Hjem
>
Produkter > Laser afstandsmåler modul > 1064nm lasermåldesignator > 45MJ Laser Target Designator (LTD) WIHT LRF




 WIHT LRF")
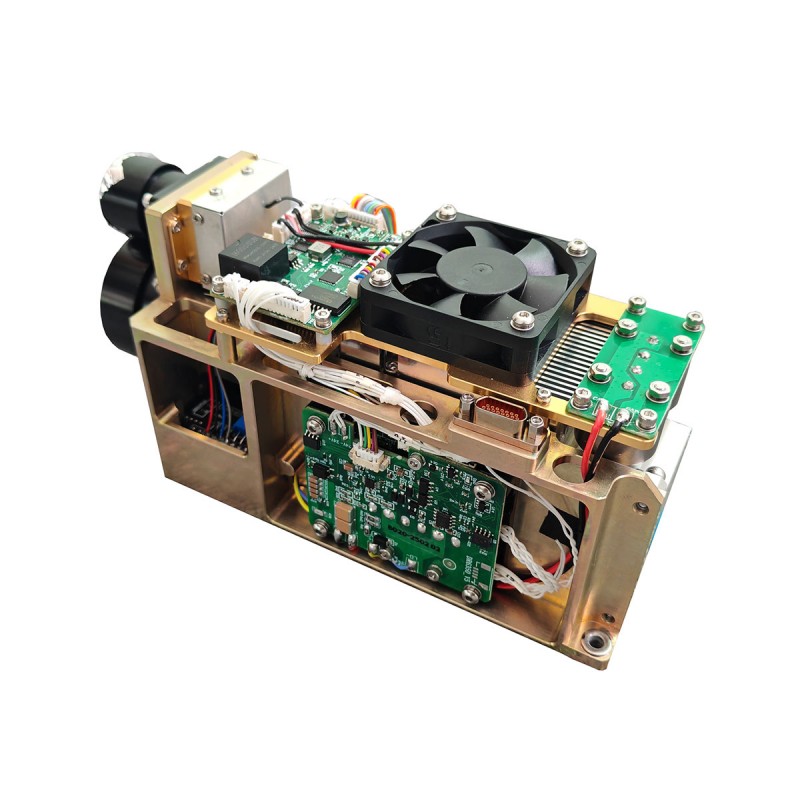
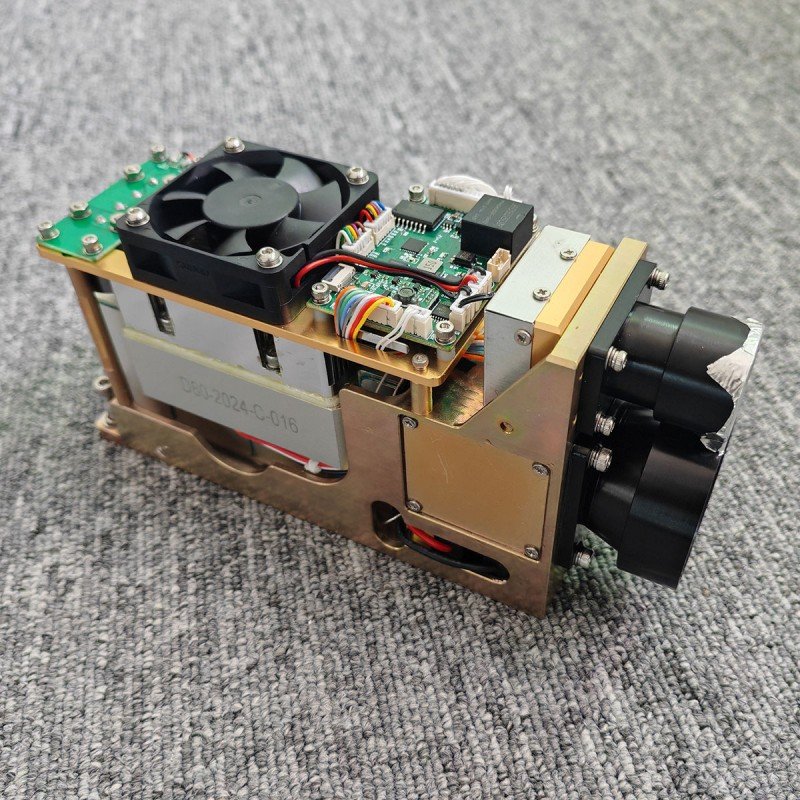
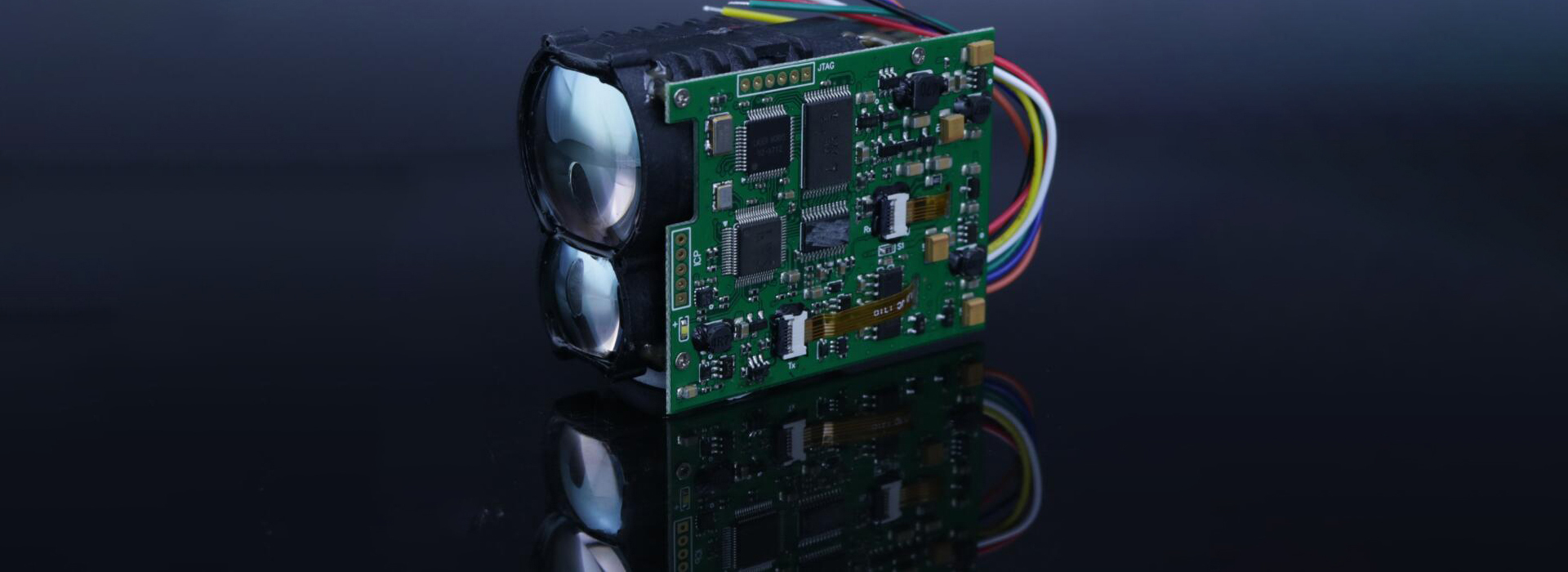
45MJ Laser Target Designator (LTD) WIHT LRF
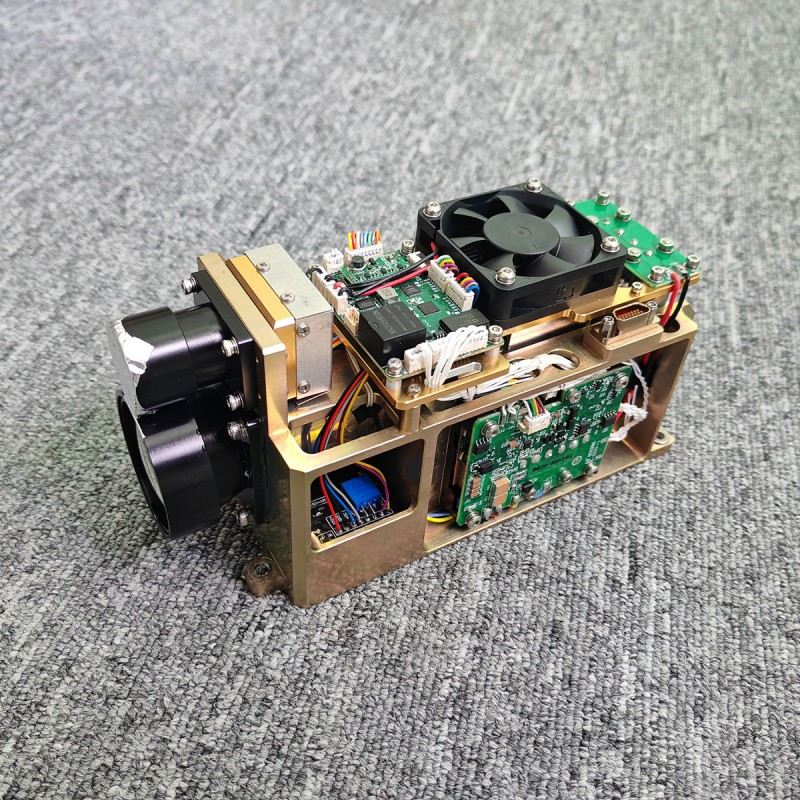
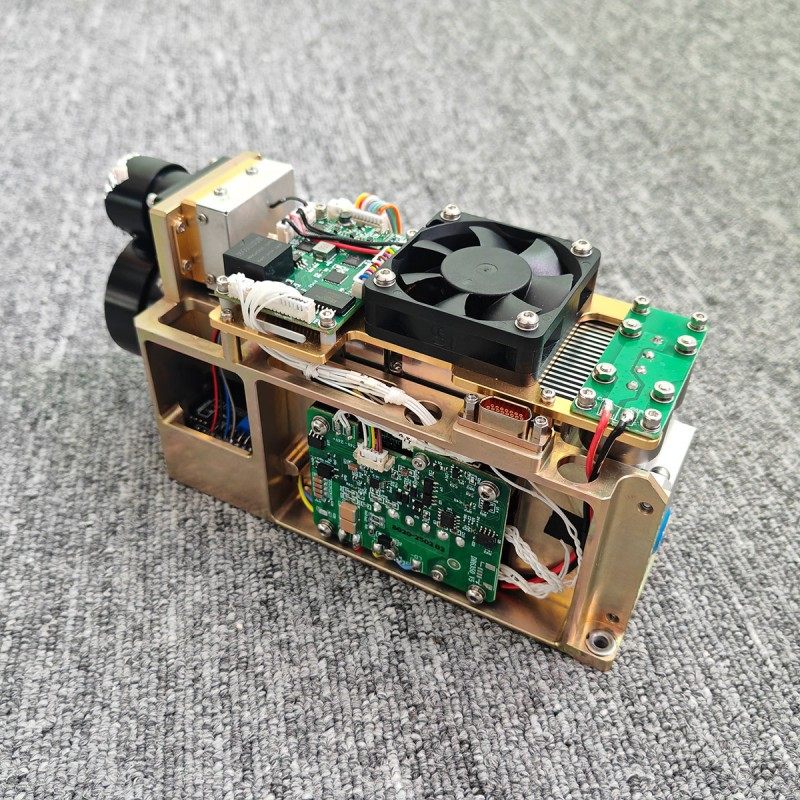
STA-B45M er en militær 45MJ-lasermåldesignator, der spiller en afgørende rolle i præcisions målretningssystemer, der er i stand til at give præcis vejledning til smart ammunition. Gennem et avanceret optisk system markerer det målet med en laserstråle, hvilket sikrer, at præcisionsstyrede våben kan ødelægge målet med ekstremt høj nøjagtighed og effektivitet.
Send forespørgsel
Produkt beskrivelse
Produktfunktioner
Let og miniaturiseret
Miljøtilpasningsevne: -40 ℃ ~ 60 ℃ bred temperaturtilpasningsevne
Miljøtilpasningsevne: -40 ℃ ~ 60 ℃ bred temperaturtilpasningsevne
Kerneindikatorparametre
Fungere
a) Det har funktionen af at indstille bestrålingscyklussen og kan udføre laserbestråling i henhold til den indstillede cyklus.
b) udstyret med laser enkelt og gentagne funktioner.
c) udstyret med multimåling af funktion.
d) Udstyret med temperaturudgangsfunktion for kameraets kernekomponenter.
e) Udstyret med overophedningsbeskyttelsesfunktion til måleenheden.
f) Udstyret med funktionen af udsendelsesstatusoplysninger om belysningsenheden.
a) Det har funktionen af at indstille bestrålingscyklussen og kan udføre laserbestråling i henhold til den indstillede cyklus.
b) udstyret med laser enkelt og gentagne funktioner.
c) udstyret med multimåling af funktion.
d) Udstyret med temperaturudgangsfunktion for kameraets kernekomponenter.
e) Udstyret med overophedningsbeskyttelsesfunktion til måleenheden.
f) Udstyret med funktionen af udsendelsesstatusoplysninger om belysningsenheden.
Tekniske parametre
| Model | STA-B6445M |
| Laserbølgelængde | 1.06um (ved hjælp af ND: YAG Crystal, designvalggaranti) |
| Lasergennemsnitlig energi | ≥ 45MJ (energisvingninger ≤ ± 8%); |
| Laserdivergensvinkel | 0,5 mrad |
| laseremission optisk akse stabilitet | ≤ 0,05 mrad |
| Laseremission optisk akse og installationen af basisplanet er ikke parallel | ≤ 3 '(designgaranti); |
| Laserpulsbredde | 10ns ~ 22ns |
| Maks. Ranging | Synlighed ≥ 12 km, maksimal rækkevidde til måling af NATO -mål ≥ 6 km; |
| Mini i området | 100 m |
| I området gentagelsesfrekvens | 1Hz/5Hz/enkelt |
| Lige nøjagtighed | ≤ ± 2m (RMS) |
| lige nøjagtighed | ≥ 98% |
| Afstandsopløsning | ≤ 50m |
| Kontinuerlig arbejdstid | 5min (5Hz: Kontinuerlig arbejde 5min, hvile ≤ 3min, kan fortsætte med at variere). |
| Maksimal bestråling afstand | ≥ 5 km |
| Minimum bestrålingsafstand | ≤ 500m (med systemvurderingen) |
| Kontinuerlig bestrålingscyklus | 8, hver cyklus varer 25S, med 15S -interval; Efter 8 cyklusser skal du hvile interval ≤ 20 min; |
| Laserkodeperiode (indstillet efter kommunikationsprotokol) | Indstilling af rækkevidde 40ms ~ 100ms |
| Laserkodningstimingnøjagtighed | ≤ ± 2μs |
| Laserstartstid | ≤3min |
| Ekstra-kodes synkroniseringsfunktion | Ja |
| Arbejdstemperatur: | -40 ~+60 ℃ |
| Opbevaringstemperatur | -50 ~+70 ℃ |
| Vægt | ≤580g |
| Modul til dig | 138x75x50mm |
| med multi-target-måleevne og returnerer tre multi-målværdi med afstandsselektiv pasfunktion. Frequency-kode og variabel intervalkode kan indstilles (indstillet efter kommunikationsprotokol). | |
Forberedelse til brug
Kontroller, om strømforsyningsspændingen er mellem 18V og 32V. Når spændingen er for lav (mindre end 18V), kommunikerer afstandsmåleren muligvis ikke korrekt eller angiver 'ingen laserudgang', og når spændingen er for høj (mere end 32V), kan hele illuminatoren blive permanent beskadiget. Sørg for, at den nominelle outputstrøm for strømforsyningssystemet er større end 6A, hvis det er mindre end denne værdi, kan der ikke være nogen laser under drift. Sørg for, at polariteten i strømforsyningen er korrekt tilsluttet, der er en risiko for skade på udstyret, hvis polariteten vendes. Se appendiks A for definitioner af strømforsyningsstik.
Forholdsregler for brug
a) Den laser, der udsendes af denne afstandsmåler, er en 1,06 um ikke-øje sikker bølgelængde laser, undgå direkte laserlys for øjnene, når du bruger.
b) Når du justerer parallelismen i den optiske akse, skal du sørge for at blokere den modtagende linse, ellers vil detektoren blive permanent beskadiget på grund af det stærke ekko.
c) Dette afstandsmodul er ikke-lufttæt, sørg for at bruge miljøet, som den relative fugtighed er mindre end 80%, og sikre, at brugen af miljømæssig renlighed og hygiejne for ikke at skade laseren.
d) Området for afstandsmåleren er relateret til den atmosfæriske synlighed og målets art, i tilfælde af tåge, regn og vind og sand i området reducerer området. Mål som grønne bladklynger, hvide vægge og eksponerede kalksten har bedre refleksionsevne og kan øge rækkevidden. Derudover reducerer en stigning i hældningen af målet til laserstrålen rækkevidden.
e) Det er strengt forbudt at skyde laserstrålen mod stærkt reflekterende mål såsom glas og hvide vægge inden for 100 meter for at undgå stærke ekkoer, hvilket kan forårsage skade på APD -detektoren.
f) Det er strengt forbudt at tage stikket ud eller tilslutte kablet, mens det er energisk.
g) Sørg for, at effektpolariteten er korrekt tilsluttet, ellers vil den føre til permanent skade på enheden.
b) Når du justerer parallelismen i den optiske akse, skal du sørge for at blokere den modtagende linse, ellers vil detektoren blive permanent beskadiget på grund af det stærke ekko.
c) Dette afstandsmodul er ikke-lufttæt, sørg for at bruge miljøet, som den relative fugtighed er mindre end 80%, og sikre, at brugen af miljømæssig renlighed og hygiejne for ikke at skade laseren.
d) Området for afstandsmåleren er relateret til den atmosfæriske synlighed og målets art, i tilfælde af tåge, regn og vind og sand i området reducerer området. Mål som grønne bladklynger, hvide vægge og eksponerede kalksten har bedre refleksionsevne og kan øge rækkevidden. Derudover reducerer en stigning i hældningen af målet til laserstrålen rækkevidden.
e) Det er strengt forbudt at skyde laserstrålen mod stærkt reflekterende mål såsom glas og hvide vægge inden for 100 meter for at undgå stærke ekkoer, hvilket kan forårsage skade på APD -detektoren.
f) Det er strengt forbudt at tage stikket ud eller tilslutte kablet, mens det er energisk.
g) Sørg for, at effektpolariteten er korrekt tilsluttet, ellers vil den føre til permanent skade på enheden.
Definition af interface -stikkontakter
Tabel 1 Definition af eksterne grænseflader
Tabel 1 Definition af eksterne grænseflader
| Ordre nummer | Interfacetype | Pigment | Definition | Bemærkninger |
| 1 | DB9 -interface -definition | Håndflade | Rs422 T+ | RS422 Kommunikationsgrænseflade |
| 2 | Lilla | Rs422 T- | ||
| 3 | Gul | Rs422 R- | ||
| 4 | Grøn | RS422 R+ | ||
| 5 | Hvid | GND | ||
| 6 | Aske | Ekstern trigger- | RS422 -niveau | |
| 7 | Blå | Ekstern trigger + | ||
| 8 | Definition af strømgrænseflade | Sort | VCC+ | DC 18V ~ 32V |
| 9 | Rød | Vcc- |
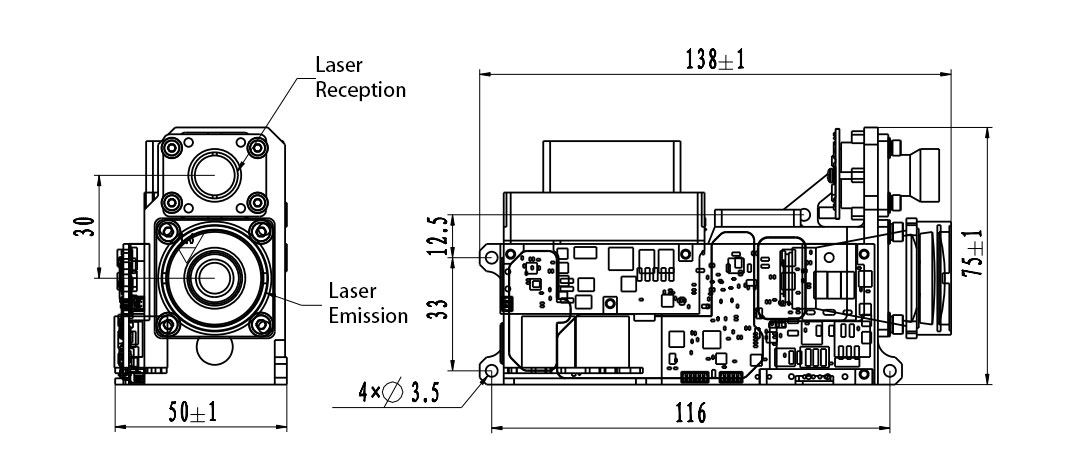
Figur 2 To-dimensionelt størrelsesdiagram over produktet
Interfacekommunikationsprotokol
1. Kommunikationsformat:
a) Standard baudhastigheden er 115200bps.
b) Dataformat: 8-bit data, en startbit, en stopbit, ingen paritetskontrol, data består af headerbyte, kommando del, datalængde, parameterdel og check byte.
2. Kommunikationstilstand:
a) Masteren og måleenheden bruger master-slave-kommunikationstilstand, hvor masteren sender kontrolkommandoer til måleenheden, og måleenheden modtager og udfører instruktionerne. I den store tilstand sender måleenheden dataene og status for måleenheden tilbage til den øverste computer i henhold til den varige periode, og kommunikationsformatet og kommandoindholdet er vist i følgende tabel.
b) Når masteren har sendt kontrolkommandoen, reagerer måleren kontinuerligt med tre svarkommandoer. Hvis skibsføreren ikke modtager svarskommandoen fra måleren inden for tidsgrænsen, sender den den igen.
Formatet for den meddelelse, der skal sendes, er som følger
a) Standard baudhastigheden er 115200bps.
b) Dataformat: 8-bit data, en startbit, en stopbit, ingen paritetskontrol, data består af headerbyte, kommando del, datalængde, parameterdel og check byte.
2. Kommunikationstilstand:
a) Masteren og måleenheden bruger master-slave-kommunikationstilstand, hvor masteren sender kontrolkommandoer til måleenheden, og måleenheden modtager og udfører instruktionerne. I den store tilstand sender måleenheden dataene og status for måleenheden tilbage til den øverste computer i henhold til den varige periode, og kommunikationsformatet og kommandoindholdet er vist i følgende tabel.
b) Når masteren har sendt kontrolkommandoen, reagerer måleren kontinuerligt med tre svarkommandoer. Hvis skibsføreren ikke modtager svarskommandoen fra måleren inden for tidsgrænsen, sender den den igen.
Formatet for den meddelelse, der skal sendes, er som følger
| STX0 | Cmd | Len | Data1h | Data1l | CHK |
Tabel 2 -format Beskrivelse af den sendte meddelelse
| ordre nummer | navn | forklare | kode | Bemærkninger |
| 1 | STX0 | Besked Start Flag | 55 (h) |
|
| 2 | Cmd | CW | Se tabel 3 |
|
| 3 | Len | Dl | Antallet af alle bytes undtagen startmærket, kommandobord og kontrolsum |
|
| 4 | Datah | Parameter | Se tabel 3 |
|
| 5 | ankomst |
|
||
| 6 | CHK | XOR -verifikation | Bortset fra den gyldige byte er alle andre bytes xored |
|
Kommandoen beskrives som følger:
Tabel 3 Beskrivelse af kommandoer og dataord sendt af masteren til måleren
Tabel 3 Beskrivelse af kommandoer og dataord sendt af masteren til måleren
| ordre nummer | CW | fungere | Data Byte | Bemærkninger | længde | Eksempelkode |
| 1 | 0x00 | Stop (stop i belysning) | D1 = 00 (h) d0 = 00 (h) |
|
Seks byte | 55 00 02 00 00 57 |
| 2 | 0x01 | Enkelt i området | D1 = 00 (h) d0 = 00 (h) | Målingsenheden modtager en enkelt instruktion i området, udfører en række operationer og uploader den afstandsafstandsværdi på samme tid; | Seks byte | 55 01 02 00 00 56 |
| 3 | 0x02 | Kontinuerligt i det | D1 = xx (h) d0 = yy (h) | I henhold til den indstillede tidsperiode uploades den afstandsafstandsværdi kontinuerligt. Data udtrykker den store periode, og enheden er MS | Seks byte | 55 02 02 03 E8 BE (1Hz Ranging) |
| 4 | 0x03 | selvkontrol | D1 = 00 (h) d0 = 00 (h) |
|
Seks byte | 55 03 02 00 00 54 |
| 5 | 0x04 | Opsætning af blind zone | D1 = xx (h) d0 = yy (h) | Data beskriver den blinde zoneværdi, enhed 1M, og indstiller afstandsdisplayet i den blinde zone til 0; | Seks byte | 55 04 02 01 2C 7E (300m er den nærmeste afstand) |
| 6 | 0x06 | Kumulativt antal lysoutputforespørgsler | D1 = 00 (h) d1 = 00 (h) | Sluk for opbevaring; | Seks byte | 55 06 02 00 00 51 |
| 7 | 0x31 | Indstil den nøjagtige kode | D4 D3 ~ D0 | D4: Præcise kodetal, indbygget 8 grupper, nummereret 1 ~ 8; D3 ~ D0 repræsenterer pulsperioden, enhed URRANGE: 45000 ~ 60000 | Ni byte | 55 31 05 01 00 00 C3 50 F3 (præcist kodetummer: 1cykel: 0000c350 = 50000US) |
| 8 | 0x32 | Indstil variable intervalkoder | D33 (ref.) D32 (antal kodende bits) D31 ~ D30 (tidsinterval mellem den sidste bit 0) D29 ~ D28 (tidsinterval mellem bit 14 og bit 15) D27 ~ D26 (Tidsinterval mellem Bit13 Bit14) D25 ~ D24 (tidsinterval mellem bit 12 og bit 13) D23 ~ D22 (tidsinterval mellem BIT112) D25 ~ D21 ~ D20 (tidsintervallet bit11) d19 ~ d18 (tidsinterval mellem bit9 bit10) d17 ~ d16 (tidsinterval mellem bit8 bit9) d15 ~ d14 (tidsinterval mellem bit7 bit8) d13 ~ d12 (tidsinterval mellem bit6 og bit7) d11 ~ d10 (tidsinterval mellem bit5 bit6) d9 ~ d8 (tidsinterval mellem bit4 bit5) d7 ~ d6 (tidsinterval mellem bit3) d5 ~ d5 ~ d4 d4 d4 d5 ~ d4 d4 d4 d4 d5 ~ d4 d4 d4 d4 d4 d4) (Tidsinterval mellem BIT2 BIT3) D3 ~ D2 (Tidsinterval mellem BIT1 BIT2) D1 ~ D0 (tidsinterval mellem BIT0 og BIT1) | D33: variabelt intervalkodetummer, indbygget 16 grupper, antallet af rækkevidde er 1 ~ 16; D32: Antal kodningsbits, der spænder fra 3 til 16-tidsintervallet Udrange: 45000 ~ 60000 | 38 byte |
|
| 9 | 0x33 | Indstilling af pseudo-tilfældige koder | D4 D3 ~ D0 | D4: pseudo-tilfældig kodekodning med 2 indbyggede grupper nummereret fra 1 til 2; D3: længde af pseudo-tilfældig kode, der spænder fra 2 til 16d2 D1: startværdien af pseudo-tilfældig kode, som er taget fra den nedre bit i henhold til længden af pseudo-random kodet0: standby, indstillet 0 | Ni byte | 55 33 05 01 10 AA AA 00 72 (Pseudo-Random Code Number: 1PSEUDO Tilfældig kodelængde: 16initial værdi: AAAA) |
| 10 | 0x41 | Indstil forespørgslen for præcisionskoder | D1 D0 | D1: Præcise kodetal, antallet af rækkevidde er 1 ~ 8d0: standby, indstillet 0 | Seks byte | 55 41 02 01 00 13Set Forespørgslen for præcisionskode 1 |
| 11 | 0x42 | Indstil forespørgslen for variable intervalkoder | D1 D0 | D1: variabelt intervalkodetummer, nummerområdet er 1 ~ 16d0: standby, indstillet 0 | Seks byte | 55 42 02 01 00 14Set Forespørgslen til variabel kodning 1 |
| 12 | 0x43 | Opret en forespørgsel til pseudo-tilfældige koder | D1 D0 | D1: pseudo-tilfældig kodetal, antallet af rækkevidde er 1 ~ 2d0: standby, sæt 0 | Seks byte | 55 43 02 01 00 15Set Forespørgslen med pseudo-tilfældig kodning 1 |
| 13 | 0x44 | Kontinuerlig bestråling af arbejdstid | D1 = 00 (h) d0 = yy (h) | YY kontinuerlig bestrålingstid henviser til den kontinuerlige arbejdstid for måleren under den kontinuerlige bestrålingstilstand, enhed s. Det automatiske stop stoppes efter timeout | Seks byte | 55 44 02 00 3c 2fcontinuøs arbejdstid 60'erne |
| 14 | 0x45 | Kontinuerlig bestråling af arbejdstid for arbejdstid | D1 = 00 (h) d0 = 00 (h) |
|
Seks byte | 55 45 02 00 00 12 |
| 15 | 0x30 | Præcis kodebestråling | D3 ~ D0 | D3: Bestrålingstilstand, 00 Kontinuerlig bestråling, 01 Periodisk bestrålingD2: 01 Præcise kodebestrålingD1: Præcise kodens nummerd0: Standby 00 | Otte byte | 55 30 04 00 01 01 00 61Code 1, Kontinuerlig belysning af præcis kode |
| Bestråling af variabel intervalkode | D3 ~ D0 | D3: Bestrålingstilstand, 00 kontinuerlig bestråling; 01 Periodisk bestråling af 2 | Otte byte | 55 30 04 00 02 01 00 62Code 1, variabel intervalkode Kontinuerlig bestråling | ||
| Ekstern synkron bestråling | D3 ~ D0 | D3: 00 Ekstern synkronisering er kun kontinuerlig belysningD2: 03 Ekstern synkron bestrålingD1: 00D0: 00 | Otte byte | 55 30 04 00 03 00 00 62 | ||
| Pseudo-tilfældig kodebestråling | D3 ~ D0 | D3: Bestrålingstilstand, 00 kontinuerlig bestråling; 01 Periodisk bestrålingD2: 04 Pseudo-Random Code IrradiationD1: Pseudo-Random Code NumberD0: Standby 00 | Otte byte | 55 30 04 00 04 01 00 64Code 1, Pseudo-Random Code Kontinuerlig bestråling | ||
| 16 | 0x24 | Periodisk bestrålingsparameterindstilling | D2 D1 D0 | D2: Antal arbejdscyklerd1: Arbejdstid pr. Cyklus, enhed SD0: hviletid pr. Cyklus, i s | Syv byte | 55 24 03 08 14 0A 64 (8 cyklusser, 20'ers arbejde og 10s hvile pr. Cyklus) |
| 17 | 0x25 | Periodisk bestrålingsparameterforespørgsel | D1 = 00 (h) d0 = 00 (h) |
|
Seks byte | 55 25 02 00 00 72 |
| 18 | 0xeb | Udstyrsnummerforespørgsel | D1 = 00 (h) d0 = 00 (h) |
|
Seks byte | 55 EB 02 00 00 f.Kr. |
| 19 | 0x51 | Debug -tilstand | D1 D0 | D1: 01 Indtast fejlfindingstilstand, 00 Exit Debugging Moded0: Standby | Seks byte | 55 41 02 01 00 17ACTER DEBUG MODE55 41 02 00 00 16Exit Debug Mode |
|
|
|
|
|
|
|
|
a) Hovedkontrol modtager format
Formatet for den modtagne meddelelse er som følger:
Formatet for den modtagne meddelelse er som følger:
| STX0 | Cmd | Len | Data | Dato0 | CHK |
Tabel 4 Format Beskrivelse af modtagne meddelelser
| ordre nummer | navn | forklare | kode | Bemærkninger |
| 1 | STX0 | Meddelelse Start Flag 1 | 55 (h) |
|
| 2 | Cmd_jg | Datakommandoord | Se tabel 5 |
|
| 3 | Len | Dl | Antallet af alle byte undtagen startmærket, kommandoord og kontrolsum |
|
| 4 | Dn | Parameter | Se tabel 5 |
|
| 5 | D0 |
|
||
| 6 | CHK | XOR -verifikation | Bortset fra den gyldige byte er alle andre bytes xored |
|
Hovedstyring Modtagelsesstatus Beskrivelse:
Tabel 5 beskriver de dataord, der er sendt af måleren til mesteren
Tabel 5 beskriver de dataord, der er sendt af måleren til mesteren
| ordre nummer | CW | Funktionsfeedback (svarende til kontrolkommandoen modtaget af måleenheden) | Data Byte | Bemærkninger | samlet længde |
| 1 | 0x00 | Stop (stop i belysning) | D1 = 00 (h) d0 = xx (h) | XX: 00 Normal Stop01 Stop ved høj temperatur02 Stop, når du er forfaldt | Seks byte |
| 2 | 0x03 | selvkontrol | D8 ~ D0C5 ~ C0B2 ~ B0 | D8-D7 (int type): -5V voltage value feedback, unit 0.01V.D6-D5: Feedback of blind spot setting value, unit 1mD4-D3: APD high voltage feedback, unit V;D2: char type, indicating the main control environment temperature (environment), unit: degrees Celsius;D1-D0: +5V voltage feedback, unit 0.01VC5-C4: Actual drive current value feedback unit AC3-C2: Indstil feedback af drevens aktuelle værdi i enhed AC1-C0: Temperaturstyringstemperatur Feedback Enhed 0,1 ℃ B2: Drevstemperaturstatus (8bit) Bit0: 0 Temperaturkontrol til temperatur 1 Ikke nået Bit1: 0 Temperaturkontrol er normal 1 temperaturstyring er overcurrentbit2: drevstrøm Forskellen mellem drevstrømmen og den indstillede værdi er større end 5AB1: drivkommunikationsstatus (måling af kommunikationsstatus mellem hovedkontrolkortet og drevmodulet) 0 er normal og 1 er fejlbit0: indstil, om strømmen er succesfuldt1: om pulsbredden er indstillet med succes bit2: Indstil om den eksterne trigger er vellykket 3: om driveren starter med succes QueryB0: Temperaturstyring Kommunikationsstatus (kommunikationsstatus mellem hovedkontrolkortet og temperaturstyringsmodulet) 0 er normal og 1 er Faultbit0: Om temperaturkontrolstart er SuccessionBit1: Om temperaturkontrolstoppestedet er SuccessionBit2: Om temperaturindstillingen er SuccessionBit3: Om temperaturkontrolforespørgslen er SuccessionBit4: SPARBIT5: SPARBIT6: SPAREBIT7: SPARER | 22 byte |
| 3 | 0x04 | Indstilling af blind zone, enhed M | D1 D0 | Data beskriver den nærmeste afstandsværdi, enhed 1m; start højt og slut lavt | Seks byte (drop strømbesparelse) |
| 4 | 0x06 | Kumulativt antal lysoutputforespørgsler | D3 ~ D0 | Data udtrykker antallet af lys, 4 byte, med høj byte først | Otte byte |
| 5 | 0x31 | Indstil den nøjagtige kode | D4 D3 ~ D0 | D4: Præcise kodetal, rækkevidde 1 ~ 8d3 ~ D0 repræsenterer perioden, enhed UsRange: 45000 ~ 60000 | Ni byte |
| 6 | 0x32 | Indstil variable intervalkoder | D1 D0 | D1 variabel intervallkodetal Range 1 ~ 16d0 00 er indstillet med succes, og 01 er indstillet mislykket | Seks byte |
| 7 | 0x33 | Indstil en pseudo-tilfældig kode | D1 D0 | D1 Pseudo-Random Code Number Range 1 ~ 2d0 00 er indstillet med succes, og 01 er indstillet mislykket | Seks byte |
| 8 | 0x41 | Præcis kodecyklusforespørgsel | D4 D3 ~ D0 | D4: Præcise kodetal, rækkevidde 1 ~ 8d3 ~ D0 repræsenterer perioden, enhed UsRange: 45000US ~ 60000US | Ni byte |
| 9 | 0x42 | Forespørgsel om variabel intervallkode | D33 (ref.) D32 (antal kodende bits) D31 ~ D30 (tidsinterval mellem den sidste bit 0) D29 ~ D28 (tidsinterval mellem bit14 bit15) D27 ~ D26 (tidsinterval mellem bit13 bit14) D25 ~ D24 (tidsinterval mellem bit 12 og bit 13) D23 ~ D22 (tidsinterval mellem bit 11 og bit 12) D21 ~ D20 (tidsinterval mellem bit 12 og bit 13) D23 ~ D222 (tidsinterval mellem bit 11 og bit 12) D21 ~ D20 (tidsinterval mellem bit 12 og bit 13) D23 ~ D2222 (tidsinterval mellem bit 11 og bit 12) D21 ~ D20 (Time Interval (Time 10 og Bit 10) 11) D19 ~ D18 (tidsinterval mellem bit9 og bit10) D17 ~ D16 (tidsinterval mellem bit8 bit9) d15 ~ d14 (tidsinterval mellem bit 7 og bit 8) d13 ~ d12 (tidsinterval mellem bit6 bit7) d11 ~ d10 (tidsinterval mellem bit5 bit6) d9 ~ d8 (tidsinterval mellem bit4 og bit5) d7 ~ d6 (tidsinterval mellem bit3)) (Tidsinterval mellem BIT2 BIT3) D3 ~ D2 (Tidsinterval mellem BIT1 BIT2) D1 ~ D0 (tidsinterval mellem BIT0 BIT1) |
|
38 byte |
| 10 | 0x43 | Pseudo-Random Code Query | D4 D3 ~ D0 | D4: pseudo-tilfældig kodekodning, rækkevidde 1 ~ 2d3: længde af pseudo-tilfældig kode, der spænder fra 2 til 16d2 d1: startværdi af pseudo-tilfældig kode, der er taget fra den nedre bit i henhold til længden af pseudo-random kodet0: standby, sæt 0 | Ni byte |
| 11 | 0x44 | Kontinuerlig bestråling af arbejdstid | D1 = 00 (h) d0 = yy (h) | Yy kontinuerlig bestrålingstid, enhed s, timeout stopper automatisk | Seks byte |
| 12 | 0x45 | Kontinuerlig eksponering Arbejdstid forespørgsel | D1 = 00 (h) d0 = yy (h) | Yy kontinuerlig bestrålingstid, enhed s, timeout stopper automatisk | Seks byte |
| 13 | 0x24 | Periodisk bestrålingsparameterindstilling | D2 D1 D0 | D2: Antal arbejdscyklerd1: Arbejdstid pr. Cyklus, enhed SD0: hviletid pr. Cyklus, i s | Syv byte |
| 14 | 0x25 | Periodisk bestrålingsparameterforespørgsel | D2 D1 D0 | D2: Antal arbejdscyklerd1: Arbejdstid pr. Cyklus, enhed SD0: hviletid pr. Cyklus, i s | Syv byte |
| 15 | 0xeb | Udstyrsnummerforespørgsel | D15 ~ D0 | D15 ~ D12: Produkt ModelD11 D10: Produktnummerd9 D8: SoftwareversionD7 D6: Juster Q NumberD5 D4: Drive NumberD3 D2: Laser NumberD1 D0: FPGA ID | 20 byte |
| 16 | 0x51 | Debug -tilstand | D1 D0 | D1: 01 Indtast fejlfindingstilstand, 00 Exit Debugging Moded0: Standby | Seks byte |
| 17 | 0x01 | Enkelt i området | D9D8 D7 D6D5 D4 D3D2 D1 D0B4 B3 B2 B1 | D9 (BIT7-bit0) Flagbyte: D9 er den 7. position, der angiver hovedbølgen; 1: Der er en hovedbølge, 0: ingen hovedbølge.d9 er den 6. position, der indikerer Echo; 1: Der er ekko, 0: ingen ECHOD9 den 5. bit angiver laserstatus; 1: Normal laser, 0: Laser Faultd9 er ugyldig (indstillet til 0) i 4. position; D9 er ugyldig i 3. position (indstillet til 0); D9 Den anden position angiver APD -staten; 1: Normal, 0: Errord9 er den første position, der angiver, om der er et tidligere mål; 1: Der er et mål, 0: Intet mål (målet før hovedmålet er det forrige mål, og målet i det blinde område) .d9 Den 0. Bit angiver, om der er et efterfølgende mål; 1: Der er et mål, 0: Der er intet mål (målet efter hovedmålet er det efterfølgende mål) D8-D6 Første målafstand (enhed 0,1 m) D5-D3-afstand til det andet mål (enhed 0,1 m) D2-D0 Tredje målafstand (enhed 0,1 m) 3. Målene er fra tæt på FARB4 og B3 indikerer højtryksværdier B2 angiver drivkraften ValueB1 B0 angiver laserens temperatur | 19 byte |
| 18 | 0x02 | Kontinuerligt i det | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (BIT7-bit0) Flagbyte: D9 er 7. position, der angiver hovedbølgen; 1: Der er en hovedbølge, 0: ingen hovedbølge.d9 er den 6. position, der indikerer Echo; 1: Der er ekko, 0: ingen ECHOD9 den 5. bit angiver laserstatus; 1: Normal laser, 0: Laser Faultd9 er ugyldig i 4. position (indstillet til 0); D9 er ugyldig i 3. position (indstillet til 0); D9 Den anden position angiver APD -staten; 1: Normal, 0: Errord9 er den første position til at indikere, om der er et tidligere mål; 1: Der er et mål, 0: Der er ikke noget mål (målet før hovedmålet er det forrige mål, og målet i det blinde område) .d9 Den 0. Bit angiver, om der er et efterfølgende mål; 1: Der er et mål, 0: Der er intet mål (målet efter hovedmålet er et efterfølgende mål) D8-D6 Første målafstand (enhed 0,1 m) D5-D3-afstand til det andet mål (enhed: 0,1 m) D2-D0 Tredje målafstand (enhed 0,1 m) 3. Målene er fra tæt på FARB4 og B3 angiver APD -højtryksværdien angiver drevens strømværdi B0 repræsenterer temperaturen på laseren | 19 byte |
| 19 | 0x30 | skinnende | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (Bit7-bit0) Flag Byte: D9 er den 7. bit for at indikere hovedbølgen; 1: Der er en hovedbølge, 0: ingen hovedbølge.d9 er den 6. position, der indikerer Echo; 1: Der er ekko, 0: ingen ECHOD9 den 5. bit angiver laserstatus; 1: Normal laser, 0: laserfejld9 er ugyldig i position 4 (indstillet til 0) D9 er ugyldig i 3. position (indstillet til 0); D9 Den anden position angiver APD -status; 1: Normal, 0: Errord9 er den første position til at indikere, om der er et tidligere mål; 1: Der er et mål, 0: Intet mål (målet før hovedmålet er det forrige mål, og målet i det blinde område) .d9 Den 0. Bit angiver, om der er et efterfølgende mål; 1: Der er et mål, 0: Der er ikke noget mål (målet efter hovedmålet er det efterfølgende mål) D8-D6 Første målafstand (enhed 0,1 m) D5-D3-afstand til det andet mål (enhed: 0,1 m) D2-D0 Tredje målafstand (enhed 0,1 m) 3. Målene er fra tæt på FARB4 og B3 angiver APD -højtryksværdien angiver drevens strømværdi B0 repræsenterer temperaturen på laseren | 19 byte |
| 20 | 0xec | En instruktionsfejl | D1 = 00 D0 = 00 | Kameraets feedback -kommando er forkert | Seks byte |
| 21 | 0xee | Effektivitetsfejl | D1 = 00 D0 = 00 | Kameraets feedback er forkert | Seks byte |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Bemærk: ① Udefinerede databyte/bit, standard er 0; | |||||
Hot Tags: 45MJ Laser Target Designator (LTD) WIHT LRF, producenter, leverandører, fabrik, Kina, lavet i Kina, tilpasset, høj kvalitet af høj kvalitet
Relateret kategori
905nm Laser Range Finder Modul
1535nm Laser Range Finder Modul
1570nm Laser Range Finder-modul
1.54um Laser Rangefinder -modul
1064nm lasermåldesignator
Anti Drone Ststem -modul
Ranging Lidar modul
Send forespørgsel
Du er velkommen til at give din forespørgsel i nedenstående formular. Vi svarer dig inden for 24 timer.




 WIHT LRF")