Hjem
>
Produkter > Laser afstandsmåler modul > Anti Drone Ststem -modul > 2MRAD 1 km laserområdefindermodul til anti -drone Ststem







2MRAD 1 km laserområdefindermodul til anti -drone Ststem
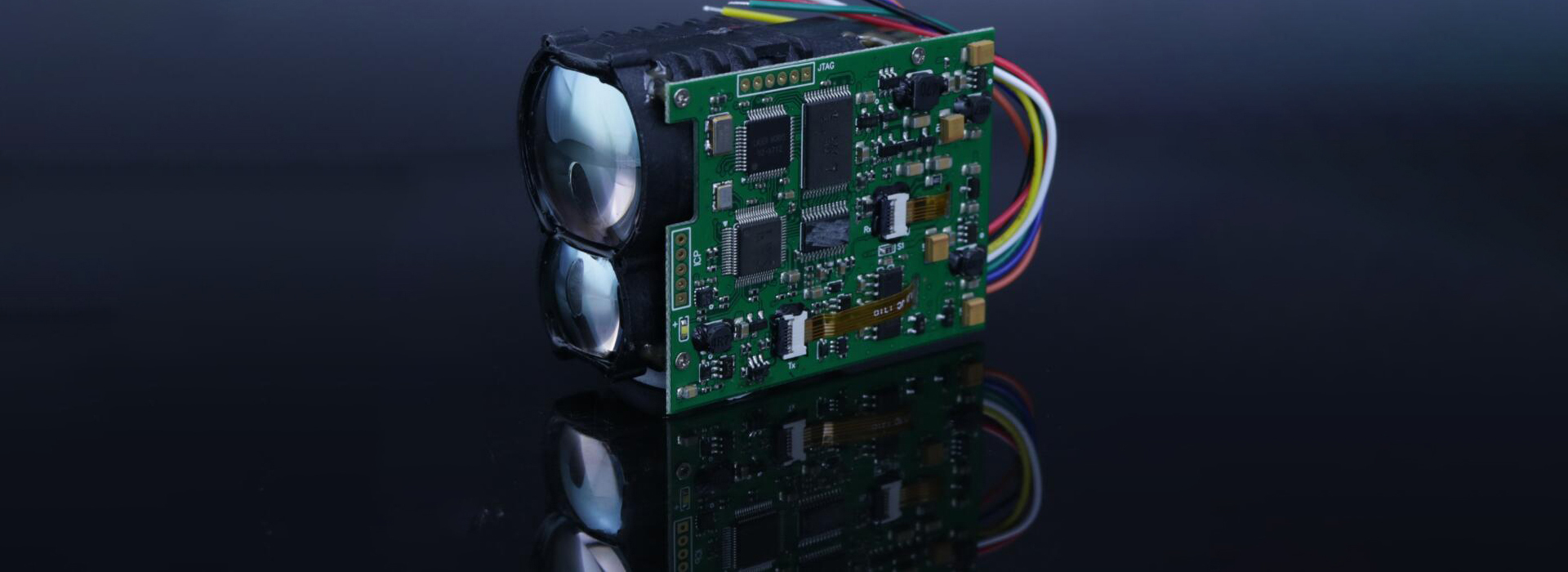
Det kompakte STA-WR1000X Laser RangeFinder-modul er meget velegnet til integration i luftforsvarssystemerne i hæren og marinen. Modulet for afstandsmåling vedtager den mest avancerede diode pumpede Erbium -glaslaser, som har høj tilgængelighed og lave vedligeholdelsesomkostninger. Dens 2Mrad-divergensvinkel kan måle UAV'er med et tværsnit på 0,1 ㎡ op til 1000 meter, hvilket gør det til en vigtig komponent i anti-dronesystemer.
Send forespørgsel
Produkt beskrivelse
1) enkeltområder og kontinuerlige områder;
2) reagerer på laserområder, der spænder og stopper for når som helst i henhold til stopkommandoen;
3) Output afstandsdata og statusoplysninger en gang pr. Puls under varierende;
4) det kan rapportere det kumulative antal transmitterede laserimpulser (intet tab af strøm ned);
5) valg af afstand før og efter målindikation;
6) Selvtestfunktion.
2) reagerer på laserområder, der spænder og stopper for når som helst i henhold til stopkommandoen;
3) Output afstandsdata og statusoplysninger en gang pr. Puls under varierende;
4) det kan rapportere det kumulative antal transmitterede laserimpulser (intet tab af strøm ned);
5) valg af afstand før og efter målindikation;
6) Selvtestfunktion.
Laseromfangsfunktion;
Laserbestrålingsfunktion;
fotoelektrisk isoleringssignal trigger;
Demonteret målretning;
ekstern triggerfunktion;
Laserbestrålingsfunktion;
fotoelektrisk isoleringssignal trigger;
Demonteret målretning;
ekstern triggerfunktion;
Hoved tekniske indikatorer
| Optisk indeks | |
| Bølgelængde | 1535nm ± 5nm |
| Laserdivergensvinkel | ≤2mrad |
| Effektiv modtagelse af blænde | 25 mm |
| Rækkefrekvens | Enkelt, 1 ~ 10Hz justerbar |
| Rækkevidde | Synlighed ≥ 12 km, målreflektivitet ≥ 0,3, fugtighed ≤ 80%, UAV i området (0,25 m × 0,25 m) ≥ 2 km |
| Lige nøjagtighed | ≤ ± 1m (rms) |
| Nøjagtighedsmåling | ≥98% |
| Falsk alarmhastighed | ≤1% |
| Minimum måleområde | ≤30m |
| Laserakse stabilitet | ≤0,05Mrad |
| Den optiske akse er parallel med installationsreferencen | ≤0,3 mrad |
| Mekaniske indikatorer | |
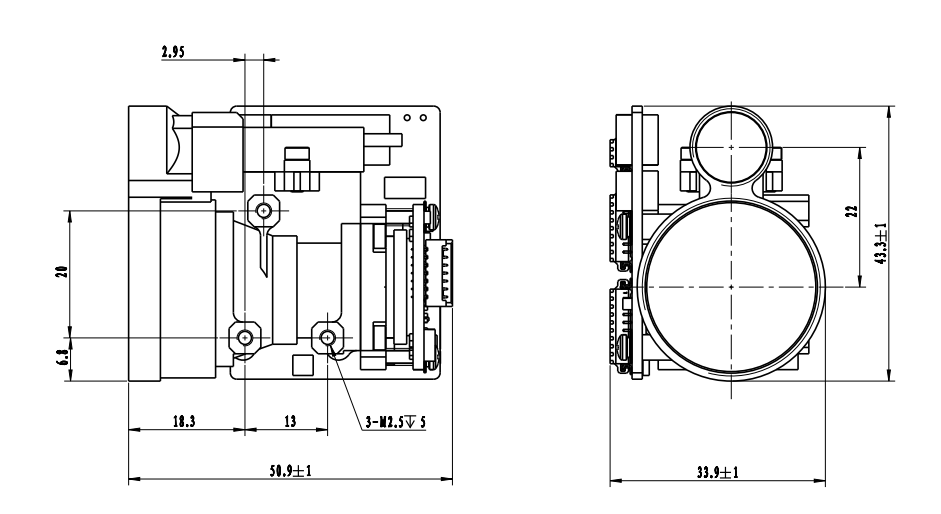
| Størrelse | ≤52mm × 45 mm × 35mm |
| Vægt | ≤ 75g |
| Elektriske indikatorer | |
| Levering af elektricitet | DC9V ~ 32V |
| Strømafledning | Arbejd mindre end 3W@10Hz, maksimal strømforbrug mindre end 5W |
| Interface | RS422 -interface, 115200bps |
| Kraft på kontrolgrænseflade | Når den sikre afstand er nået, skal du tænde og bruge den; eller i lav effekttilstand for at kontrollere sin arbejdende tilstand |
| Beskyttelse af kredsløbskort | Efter at design og fejlsøgning af kredsløbskortet er afsluttet, kræves det at belægge anti-shock-malingen og udføre "tre beskyttelses" -behandlingen |
| Miljømæssig egnethed | |
| Arbejdstemperatur | -40 ℃ -65 ℃ |
| Opbevaringstemperatur | -55 ℃ -70 ℃ |
| Vibrere | GJB150.16 A-2009 "Militært udstyr Laboratorieprøvemetoder-Vibrationstest" |
| Lash | GJB150.18 A-2009 "Militært udstyr Laboratorieforsøg Metode-impact-test" |
Note:
1. Landingsområde Beskrivelse: Området ændres under forskellige testbetingelser og testmål, hvis du registrerer specielle mål, skal du kontakte salgssiden for at bekræfte;
2.Minimumsområde: 30m-100 m svingninger, det anbefales til 50 m efter normal brug; På grund af, at laserenergien er stor, kan brug af tæt rækkevidde forbrænde detektorchippen, så ved fejlfinding, skal du medbringe et godt spejlafdækning for at forhindre, at detektorchippen brændes.
2.Minimumsområde: 30m-100 m svingninger, det anbefales til 50 m efter normal brug; På grund af, at laserenergien er stor, kan brug af tæt rækkevidde forbrænde detektorchippen, så ved fejlfinding, skal du medbringe et godt spejlafdækning for at forhindre, at detektorchippen brændes.
Mekanisk strukturdiagram
Krav til elektriske interface
Kommunikationsgrænseflade: Rs422.115200bps, 1 startbit, 8 databits, 1 stop bit, ingen paritet;
Tabel 2 Interface Line Definition
Tabel 2 Interface Line Definition
| Stift | definition | fungere | Bemærkninger |
| 1 | RX+ | RS422 modtager positiv |
|
| 2 | Rx- | RS422 modtager negativt |
|
| 3 | Tx- | RS422 sender negativt |
|
| 4 | TX+ | RS422 sender positivt |
|
| 5 | GND |
|
|
| 6 | Vee | 9-32V |
|
| 7 | GND |
|
|
| 8 | Pwr_en | obligatorisk | Søvnkontrol |
1. Andre oplysninger
1) STA-WR1000X i området modulet bruges specielt til at måle afstanden til UAV;
2) Specifikationer kan revideres fra tid til anden, bekræft størrelsesspecifikationerne for produkterne med sælgeren, inden du afgiver en ordre;
3) Det varierende modul bruger en samlet kommunikationsprotokol og øvre computer. Hvis du har brug for at ringe til det, bedes du kontakte sælgeren.
2. Kommunikationsprotokol
1) transmissionsprotokol: asynkron seriel kommunikation;
2) Baud Rate: 115200;
3) Databits: 10 Bits: One Start Bit, 8 Data Bits, 1 Stop Bit, ugyldig verifikation;
4) datastruktur: Dataene består af den første byte, kommandodelen, datalængden, parameterdelen og checkbyte;
5) Kommunikationstilstand: Masteren sender kontrolkommandoer til den rækkevidde maskine, og den varierende maskine modtager og udfører instruktionerne. I den varierende tilstand sender den rækkevidde maskine data og status for den rangende maskine tilbage til den øvre computer i henhold til den intervallercyklus. Kommunikationsformatet og kommandoindholdet er vist i følgende tabel.
a) Hovedkontrol sender
Formatet for den meddelelse, der skal sendes, er som følger:
1) STA-WR1000X i området modulet bruges specielt til at måle afstanden til UAV;
2) Specifikationer kan revideres fra tid til anden, bekræft størrelsesspecifikationerne for produkterne med sælgeren, inden du afgiver en ordre;
3) Det varierende modul bruger en samlet kommunikationsprotokol og øvre computer. Hvis du har brug for at ringe til det, bedes du kontakte sælgeren.
2. Kommunikationsprotokol
1) transmissionsprotokol: asynkron seriel kommunikation;
2) Baud Rate: 115200;
3) Databits: 10 Bits: One Start Bit, 8 Data Bits, 1 Stop Bit, ugyldig verifikation;
4) datastruktur: Dataene består af den første byte, kommandodelen, datalængden, parameterdelen og checkbyte;
5) Kommunikationstilstand: Masteren sender kontrolkommandoer til den rækkevidde maskine, og den varierende maskine modtager og udfører instruktionerne. I den varierende tilstand sender den rækkevidde maskine data og status for den rangende maskine tilbage til den øvre computer i henhold til den intervallercyklus. Kommunikationsformatet og kommandoindholdet er vist i følgende tabel.
a) Hovedkontrol sender
Formatet for den meddelelse, der skal sendes, er som følger:
| STX0 | Cmd | Len | Data1h | Data1l | CHK |
Tabel 2 -format Beskrivelse af den sendte meddelelse
| ordre nummer | navn | forklare | kode | Bemærkninger |
| 1 | STX0 | Besked Start Flag | A5 (H) |
|
| 2 | Cmd | CW | Se tabel 3 |
|
| 3 | Len | Dl | Antallet af alle bytes undtagen startmærket, kommandobord og kontrolsum |
|
| 4 | Datah | Parameter | Se tabel 3 |
|
| 5 | ankomst |
|
||
| 6 | CHK | XOR -verifikation | Bortset fra den gyldige byte er alle andre bytes xored |
|
Kommandoen beskrives som følger:
Tabel 3 Beskrivelse af kommandoer og dataord sendt af masteren til den rækkevidde maskine
Tabel 3 Beskrivelse af kommandoer og dataord sendt af masteren til den rækkevidde maskine
| ordre nummer | CW | fungere | Data Byte | Bemærkninger | længde | Eksempelkode |
| 1 | 0x00 | ophøre | Datah = 00 (h) Datal = 00 (h) | Rangefinderen stopper måling | Seks byte | A5 00 02 00 A7 |
| 2 | 0x01 | Enkelt i området | Datah = 00 (h) Datal = 00 (h) |
|
Seks byte | A5 01 02 00 00 A6 |
| 3 | 0x02 | Kontinuerligt i det | Datah = xx (h) Datal = yy (h) | Data beskriver den store periode, i MS | Seks byte | A5 02 02 03 E8 4E (1Hz Ranging) |
| 4 | 0x03 | selvkontrol | Datah = 00 (h) Datal = 00 (h) |
|
Seks byte | A5 02 02 00 A4 |
| 5 | 0x04 | Indstil den nærmeste afstand til valget | Datah = xx (h) Datal = yy (h) | Data beskriver den blinde zoneværdi, enhed 1m | Seks byte | A5 04 02 00 64 C7 (100m er den nærmeste afstand) |
| 6 | 0x06 | Kumulativt antal lysoutputforespørgsler | Datah = 00 (h) Datal = 00 (h) | Kumulativt antal lysoutputforespørgsler | Seks byte | A5 06 02 00 A1 |
| 7 | 0x11 | APD Power er på | Datah = 00 (h) Datal = 00 (h) |
|
Seks byte | A5 11 02 00 B6 |
| 8 | 0x12 | APD Power er slukket | Datah = 00 (h) Datal = 00 (h) |
|
Seks byte | A5 12 02 00 B5 |
| 9 | 0xeb | Nummerforespørgsel | Datah = 00 (h) Datal = 00 (h) | Nummerforespørgsel | Seks byte | A5 EB 02 00 00 4C |
b) Hovedkontrol modtager format
Formatet for den modtagne meddelelse er som følger:
Formatet for den modtagne meddelelse er som følger:
| STX0 | Cmd | Len | Data | Dato0 | CHK |
Tabel 4 Format Beskrivelse af modtagne meddelelser
| ordre nummer | navn | forklare | kode | Bemærkninger |
| 1 | STX0 | Meddelelse Start Flag 1 | A5 (H) |
|
| 2 | Cmd_jg | Datakommandoord | Se tabel 5 |
|
| 3 | Len | Dl | Antallet af alle bytes undtagen startmærket, kommandobord og kontrolsum |
|
| 4 | Dn | Parameter | Se tabel 5 |
|
| 5 | D0 |
|
||
| 6 | CHK | XOR -verifikation | Bortset fra den gyldige byte er alle andre bytes xored |
|
Hovedstyring Modtagelsesstatus Beskrivelse:
Tabel 5 beskriver dataordet, der er sendt af RangeFinder til Master Controller
Tabel 5 beskriver dataordet, der er sendt af RangeFinder til Master Controller
| ordre nummer | CW | fungere | Data Byte | Bemærkninger | samlet længde |
| 1 | 0x00 | ophøre | D1 = 00 (h) d0 = 00 (h) |
|
Seks byte |
| 2 | 0x03 | selvkontrol | D8 ~ D1 | D8-D7: -5V spænding, enhed 0,01V.D6-D5: blind pletværdi, enhed 1MD4: APD høj spændingsværdi, enhed V; D3: CHAR-type, hvilket indikerer APD-temperatur, enhed: grader Celsius; D2-D1: +5V spænding, enhed 0,01V | 12 bytes |
| 3 | 0x04 | Afstand til den nærmeste adgangsindstilling, enhed M | D1 D0 | Data beskriver den nærmeste afstandsværdi, enhed 1m; start højt og slut lavt | Seks byte |
| 4 | 0x06 | Kumulativt antal lysoutputforespørgsler | D3 ~ D0 | Data udtrykker antallet af gange lys udsendes, 4 byte, med først den høje byte | Syv byte |
| 5 | 0x11 | APD Power er på | D1 = 00 (h) d0 = 00 (h) | APD Power er på | Seks byte |
| 6 | 0x12 | APD sluk | D1 = 00 (h) d0 = 00 (h) | APD sluk | Seks byte |
| 7 | 0xed | Arbejder overarbejde | 0x00 0x00 | Laseren er under laserarbejdsbeskyttelse og kan ikke måles. | Seks byte |
| 8 | 0xee | Effektivitetsfejl | 0x00 0x00 |
|
Seks byte |
| 9 | 0xef | Timeout for seriel port kommunikation | 0x00 0x00 |
|
Seks byte |
| 10 | 0x01 | Måling med en enkelt rækkevidde (enkelt mål, nul for det andet og tredje mål, nul for det tredje mål i begyndelsen og slutningen af målet) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 Første målafstand (enhed 0,1 m) D5-D3-afstand til det andet mål (enhed: 0,1 m) D2-D0 Tredje målafstand (enhed 0,1 m) 3. Målene er fra tæt på FARD9 (BIT7-bit0) Flag Byte: D9 er den 7. bit for at indikere hovedbølgen; 1: Der er en hovedbølge, 0: ingen hovedbølge.d9 er den 6. position, der indikerer Echo; 1: Der er ekko, 0: ingen ECHOD9 Den femte position angiver laserstatus; 1: Normal laser, 0: Laser Faultd9 er den fjerde bit af timeout -flag, 1: Normal, 0: timeoutd9 er ugyldig i 3. position (indstillet til 1); D9 Den anden position indikerer APD -staten; 1: Normal, 0: Errord9 er den første position til at indikere, om der er et tidligere mål; 1: Der er et tidligere mål, 0: Intet tidligere mål (mål i det blinde område) .d9 Den 0. bit angiver, om der er et efterfølgende mål; 1: Der er et efterfølgende mål, 0: Intet efterfølgende mål (målet efter hovedmålet er det efterfølgende mål) | 14 byte |
| 11 | 0x02 | Kontinuerlig rækkevidde (enkelt mål, nul for det andet og tredje mål, nul for det tredje mål i begyndelsen og slutningen af målet) | D9 D8 D7 D6D5 D4D2 D1 D0 | D8-D6 Første målafstand (enhed 0,1 m) D5-D3-afstand til det andet mål (enhed: 0,1 m) D2-D0 Tredje målafstand (enhed 0,1 m) 3. Målene er fra tæt på FARD9 (BIT7-bit0) Flag Byte: D9 er den 7. bit for at indikere hovedbølgen; 1: Der er en hovedbølge, 0: ingen hovedbølge.d9 er den 6. position, der indikerer Echo; 1: Der er ekko, 0: ingen ECHOD9 den 5. bit angiver laserstatus; 1: Normal laser, 0: Laser Faultd9 er den fjerde bit af timeout -flag, 1: Normal, 0: timeoutd9 er ugyldig i 3. position (indstillet til 1); D9 Den anden position indikerer APD -staten; 1: Normal, 0: Errord9 er den første position til at indikere, om der er et tidligere mål; 1: Der er et tidligere mål, 0: Intet tidligere mål (mål i det blinde område) .d9 Den 0. bit angiver, om der er et efterfølgende mål; 1: Der er et efterfølgende mål, 0: Intet efterfølgende mål (målet efter hovedmålet er det efterfølgende mål) | 14 byte |
| 12 | 0xeb | Nummerforespørgsel | D17 …… D0 | D17 D16 D15 D14 D13 D12 HELE MASKINMODEL KODED11D10 Produktnummerd9 D6 Software VersionD5 D4 APD NumberD3 D2 Laser NumberVersion D1 af FPGA | 22 byte |
| Bemærk: ① Udefinerede databyte/bit, standard er 0; | |||||
Hot Tags: 2Mrad 1 km laserområdefindermodul til anti -drone -ststem, producenter, leverandører, fabrik, Kina, lavet i Kina, tilpasset, høj kvalitet af høj kvalitet
Relateret kategori
905nm Laser Range Finder Modul
1535nm Laser Range Finder Modul
1570nm Laser Range Finder-modul
1.54um Laser Rangefinder -modul
1064nm lasermåldesignator
Anti Drone Ststem -modul
Ranging Lidar modul
Send forespørgsel
Du er velkommen til at give din forespørgsel i nedenstående formular. Vi svarer dig inden for 24 timer.