Hjem
>
Produkter > Laser afstandsmåler modul > 1535nm Laser Range Finder Modul > 5 km øjensikker laserafstandsmålermodul (LRF)




")




5 km øjensikker laserafstandsmålermodul (LRF)
STA-B50MX er et menneskeligt øje-sikkert laserafstandsmålingsmodul, som kan registrere målafstanden og overføre den målte afstand til den øverste computer via seriel kommunikation. Sigtbarhed ≥ 12 km, målreflektivitet ≥ 0,3, luftfugtighed ≤ 80 %, køretøjet (2,3 m × 2,3 m NATO-mål) rækkevidde ≥ 5 km.
Send forespørgsel
Produkt beskrivelse
Hovedfunktioner
(1) Enkelt og kontinuerligt område;
(2) Reagerer på laserafstandskommandoer og kan stoppe med at måle til enhver tid i henhold til stopkommandoen;
(3) Output distancedata og statusinformation én gang pr. puls under afstandsmåling;
(4) Den kan rapportere det kumulative antal transmitterede laserimpulser (intet tab af strømafbrydelse);
(5) Afstandsvalg, forreste og bageste målindikation;
(6) Selvtestfunktion.
(2) Reagerer på laserafstandskommandoer og kan stoppe med at måle til enhver tid i henhold til stopkommandoen;
(3) Output distancedata og statusinformation én gang pr. puls under afstandsmåling;
(4) Den kan rapportere det kumulative antal transmitterede laserimpulser (intet tab af strømafbrydelse);
(5) Afstandsvalg, forreste og bageste målindikation;
(6) Selvtestfunktion.
Produktets ydeevneindeks
| Punkt | Teknisk parameter | Instruktion |
| Model | STA-B50MX | |
| Arbejdsbølgelængde | 1535±5nm | |
| Øjensikkerhed | Klasse 1 (IEC 60825-1) | |
| Modtagende blænde | Φ25 mm | |
| Emissionsåbning | Φ10 mm | |
| Rangeringsevne | 30-8000m | |
| Rækkevidde | ≥10000m | MAX Rækkevidde, reflektivitet: 0,9, observatør synlighed 25 km |
| ≥7000m | Store bygningsmål, reflektivitet: 0,6, observatørsigt 20 km | |
| ≥5000m | NATO mål | |
| ≥3000m | Menneskeligt mål | |
| ≥1500m | UAV mål | |
| Mini Range | 30m |
|
| Multi-target detektion | Op til 3 mål |
|
| Rækkevidde opløsning | 30m |
|
| Rangerende nøjagtighed | ±1m |
|
| Rangeringsfrekvens | 1~10Hz justerbar |
|
| Nøjagtighedsgrad | ≥98 % |
|
| Falsk alarmfrekvens | 1 % |
|
| Divergensvinkel | ≤0,5mrad |
|
| Kommunikationsgrænseflade | RS422 | TTL/RS232 Interface kan tilpasses |
| Spænding | DC9~32V |
|
| Strømforbrug | ≤1,2W(@1Hz) | Arbejdskraft |
| ≤5W@12V | Topkraft | |
| 0,1W | Standby strøm (Tilslut POWER-ON) | |
| Laser optisk akse stabilitet | ≤0,05 mrad |
|
| Parallel fejl | ≤0,3mrad | Parallelismefejl af optisk akse til monteringsreference |
| Mekanisk stød | 75 g, 1 ms |
|
| Arbejdstemperatur | -40℃~+70℃ |
|
| Opbevaringstemperatur | -55℃~+75℃ |
|
| Pålidelighed | MTBF ≥ 1500 timer |
|
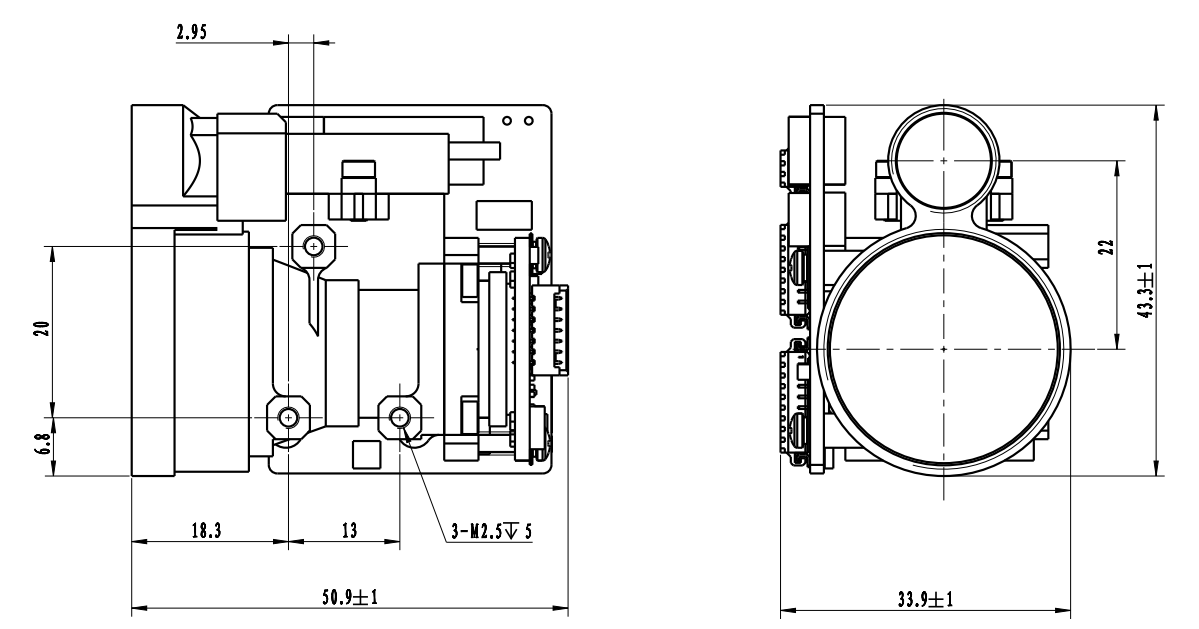
| Størrelse | ≤50x32x43,5 mm |
|
| Vægt | ≤75g |
|
| Hovedfunktion | Første og sidste målområde, Multi-target rækkevidde, Distance selektivitet | |
Bemærkninger:
1) NATO-målstørrelse 2,3 m × 2,3 m; Menneskelig målstørrelse 0,5 m × 1,7 m; UAV-målstørrelse 0,2 m × 0,3 m; Refleksionsevne 30 %, luftfugtighed ≤ 80 %, observatørsynlighed ≥ 12 km
Struktur installation interface
Ekstern grænseflade
| Stift | Definition | Fungere | Noter |
| 1 | RX+ | RS422 modtager + | Blå |
| 2 | RX- | RS422 modtager - | Grøn |
| 3 | TX- | RS422 transmission - | Lilla |
| 4 | TX+ | RS422 transmission + | Gul |
| 5 | GND | Kommunikationsjordledning | Hvid |
| 6 | VEE | Strømforsyning + | Rød |
| 7 | GND | Strømforsyning - | Sort |
| 8 | PWR EN | / | Aske |
Ekstern grænseflade
OEM/ODM-moduler og tilpassede løsninger
B50MX er designet til systemintegratorer, der leder efter en praktisk, kraftfuld og kompakt laserafstandsløsning. Det giver pålidelig ydeevne i en lang række applikationer.
Den er meget lille, ultralet, har lavt strømforbrug og kan måles over lang afstand. Den er velegnet til håndholdte enheder (termisk billeddannelse), våbenmonteringsapplikationer, bærbare systemer og letvægtssensorsuiter og ubemandede luftfartøjer eller UGV'er.
B50MX er designet til systemintegratorer, der leder efter en praktisk, kraftfuld og kompakt laserafstandsløsning. Det giver pålidelig ydeevne i en lang række applikationer.
Den er meget lille, ultralet, har lavt strømforbrug og kan måles over lang afstand. Den er velegnet til håndholdte enheder (termisk billeddannelse), våbenmonteringsapplikationer, bærbare systemer og letvægtssensorsuiter og ubemandede luftfartøjer eller UGV'er.
Kommunikationsprotokol
1. Transmissionsprotokol: asynkron seriel kommunikation;
2. Port rate: 115200;
3. Databit: 10bit: en startbit, 8 databit, en stopbit, ugyldig verifikation;
4. Datastruktur: Dataene består af header-byte, kommandodel, datalængde, parameterdel og kontrolbyte;
5. Kommunikationstilstand: Hovedstyringen sender kontrolkommandoer til afstandsmaskinen, og afstandsmaskinen modtager og udfører instruktionerne. I afstandstilstanden sender afstandsmaskinen data og status for afstandsmaskinen tilbage til den øverste computer i henhold til afstandscyklussen. Kommunikationsformatet og kommandoindholdet er vist i følgende tabel.
A) Hovedstyring sender
Formatet på den besked, der skal sendes, er som følger:
2. Port rate: 115200;
3. Databit: 10bit: en startbit, 8 databit, en stopbit, ugyldig verifikation;
4. Datastruktur: Dataene består af header-byte, kommandodel, datalængde, parameterdel og kontrolbyte;
5. Kommunikationstilstand: Hovedstyringen sender kontrolkommandoer til afstandsmaskinen, og afstandsmaskinen modtager og udfører instruktionerne. I afstandstilstanden sender afstandsmaskinen data og status for afstandsmaskinen tilbage til den øverste computer i henhold til afstandscyklussen. Kommunikationsformatet og kommandoindholdet er vist i følgende tabel.
A) Hovedstyring sender
Formatet på den besked, der skal sendes, er som følger:
| STX0 | CMD | LEN | DATA1H | DATA1L | CHK |
Tabel 2 Formatbeskrivelse af den sendte besked
| ordrenummer | navn | forklare | kode | bemærkninger |
| 1 | STX0 | Besked startflag | A5(H) |
|
| 2 | CMD | CW | Se tabel 3 |
|
| 3 | LEN | DL | Antallet af alle bytes undtagen startmærket, kommandoordet og kontrolsummen |
|
| 4 | DATAH | parameter | Se tabel 3 |
|
| 5 | DATAL |
|
||
| 6 | CHK | XOR-bekræftelse | Bortset fra den gyldige byte, er alle andre bytes XORed |
|
Kommandoen er beskrevet som følger:
Tabel 3 Beskrivelse af kommandoer og dataord sendt af masteren til afstandsmaskinen
Tabel 3 Beskrivelse af kommandoer og dataord sendt af masteren til afstandsmaskinen
| ordrenummer | CW | fungere | data byte | bemærkninger | længde | Eksempel kode |
| 1 | 0x00 | ophøre | DATAH=00(H)DATAL=00(H) | Afstandsmåleren holder op med at måle | Seks bytes | A5 00 02 00 00 A7 |
| 2 | 0x01 | Enkelt rækkevidde | DATAH=00(H)DATAL=00(H) |
|
Seks bytes | A5 01 02 00 00 A6 |
| 3 | 0x02 | Kontinuerlig rangering | DATAH=XX(H)DATAL=YY(H) | DATA beskriver intervalperioden i ms | Seks bytes | A5 02 02 03 E8 4E (1Hz område) |
| 4 | 0x03 | selvkontrol | DATAH=00(H)DATAL=00(H) |
|
Seks bytes | A5 03 02 00 00 A4 |
| 5 | 0x04 | Indstil den nærmeste afstand til valget | DATAH=XX(H)DATAL=YY(H) | DATA beskriver blindzoneværdien, enhed 1m | Seks bytes | A5 04 02 00 64 C7 (100m er den nærmeste afstand) |
| 6 | 0x06 | Samlet antal forespørgsler om lysoutput | DATAH=00(H)DATAL=00(H) | Samlet antal forespørgsler om lysoutput | Seks bytes | A5 06 02 00 00 A1 |
| 7 | 0x11 | APD-strømmen er tændt | DATAH=00(H)DATAL=00(H) |
|
Seks bytes | A5 11 02 00 00 B6 |
| 8 | 0x12 | APD-strømmen er slukket | DATAH=00(H)DATAL=00(H) |
|
Seks bytes | A5 12 02 00 00 B5 |
| 9 | 0xEB | Nummerforespørgsel | DATAH=00(H)DATAL=00(H) | Nummerforespørgsel | Seks bytes | A5 EB 02 00 00 4C |
a) Hovedkontrol modtager format
Formatet på den modtagne besked er som følger:
Formatet på den modtagne besked er som følger:
| STX0 | CMD | LEN | DATAn | DATA0 | CHK |
Tabel 4 Formatbeskrivelse af modtagne beskeder
| ordrenummer | navn | forklare | kode | bemærkninger |
| 1 | STX0 | Besked startflag 1 | A5 (H) |
|
| 2 | CMD_JG | Data kommandoord | Se tabel 5 |
|
| 3 | LEN | DL | Antallet af alle bytes undtagen startmærket, kommandoordet og kontrolsummen |
|
| 4 | Dn | parameter | Se tabel 5 |
|
| 5 | D0 |
|
||
| 6 | CHK | XOR-bekræftelse | Bortset fra den gyldige byte, er alle andre bytes XORed |
|
Beskrivelse af hovedkontrolmodtagelsesstatus:
Tabel 5 beskriver dataordet sendt af afstandsmåleren til mastercontrolleren
Tabel 5 beskriver dataordet sendt af afstandsmåleren til mastercontrolleren
| ordrenummer | CW | fungere | data byte | bemærkninger | samlet længde |
| 1 | 0x00 | ophøre | D1=00(H)D0=00(H) |
|
Seks bytes |
| 2 | 0x03 | selvkontrol | D8 ~D1 | D8-D7: -5V spænding, enhed 0,01V.D6-D5: Blind vinkel værdi, enhed 1mD4: APD højspændingsværdi, enhed V;D3: char type, der angiver APD temperatur, enhed: grader Celsius;D2-D1: +5V spænding, enhed 0,01V | 12 bytes |
| 3 | 0x04 | Afstand til nærmeste adgangsindstilling, enhed m | D1 D0 | DATA beskriver den nærmeste afstandsværdi, enhed 1m;Start højt og slut lavt | Seks bytes |
| 4 | 0x06 | Samlet antal forespørgsler om lysoutput | D3~D0 | DATA udtrykker antallet af lys, 4 bytes, med den høje byte først | Syv bytes |
| 5 | 0x11 | APD-strømmen er tændt | D1=00(H)D0=00(H) | APD-strømmen er tændt | Seks bytes |
| 6 | 0x12 | APD slukker | D1=00(H)D0=00(H) | APD-strømmen er slukket | Seks bytes |
| 7 | 0xED | Overarbejde | 0x00 0x00 | Laseren er under laserbeskyttelse og kan ikke måles. | Seks bytes |
| 8 | 0xEE | Effektivitetsfejl | 0x00 0x00 |
|
Seks bytes |
| 9 | 0XEF | Seriel port kommunikation timeout | 0x00 0x00 |
|
Seks bytes |
| 10 | 0x01 | Enkeltafstandsmåling (enkelt mål, nul for det andet og tredje mål, nul for det tredje mål ved begyndelsen og slutningen af målet) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 første målafstand (enhed 0,1m)D5-D3 afstand til det andet mål (enhed: 0,1m)D2-D0 tredje målafstand (enhed 0,1m)3. Mål er fra nær til farD9 (bit7-bit0) flagbyte:D9 er den 7. position, der angiver hovedbølgen; 1: der er en hovedbølge, 0: ingen hovedbølge. D9 er den 6. position, der indikerer ekko; 1: der er ekko, 0: intet ekkoD9 Den femte position angiver laserstatus; 1: normal laser, 0: laserfejlD9 er den fjerde bit af timeoutflaget, 1: normal, 0: timeoutD9 er ugyldig ved den 3. position (sat til 1);D9 Den anden position angiver APD-status; 1: normal, 0: fejlD9 er den første position til at angive, om der er et tidligere mål; 1: der er et tidligere mål, 0: intet tidligere mål (mål i det blinde område).D9 Den 0. bit angiver, om der er et efterfølgende mål; 1: der er et efterfølgende mål, 0: intet efterfølgende mål (målet efter hovedmålet er det efterfølgende mål) | 14 bytes |
| 11 | 0x02 | Kontinuerlig rækkevidde (enkelt mål, nul for det andet og tredje mål, nul for det tredje mål ved begyndelsen og slutningen af målet) | D9 D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 første målafstand (enhed 0,1m)D5-D3 afstand til det andet mål (enhed: 0,1m)D2-D0 tredje målafstand (enhed 0,1m)3. Mål er fra nær til farD9 (bit7-bit0) flagbyte:D9 er den 7. bit, der angiver hovedbølgen; 1: der er en hovedbølge, 0: ingen hovedbølge. D9 er den 6. position, der indikerer ekko; 1: der er ekko, 0: intet ekkoD9 Den femte position angiver laserstatus; 1: normal laser, 0: laserfejlD9 er den fjerde bit af timeoutflaget, 1: normal, 0: timeoutD9 er ugyldig ved den 3. position (sat til 1);D9 Den anden position angiver APD-tilstanden; 1: normal, 0: fejlD9 er den første position til at angive, om der er et tidligere mål; 1: der er et tidligere mål, 0: intet tidligere mål (mål i det blinde område).D9 Den 0. bit angiver, om der er et efterfølgende mål; 1: der er et efterfølgende mål, 0: intet efterfølgende mål (målet efter hovedmålet er det efterfølgende mål) | 14 bytes |
| 12 | 0xEB | Nummerforespørgsel | D17…… D0 | D17 D16 D15 D14 D13 D12 Hel maskinmodel kodeD11D10 ProduktnummerD9 D6 softwareversionD5 D4 APD nummerD3 D2 LasernummerVersion D1 af FPGA | 22 bytes |
| Bemærk: ① Udefineret databyte/bit, standard er 0; | |||||
Hot Tags: 5 km øjensikker laserafstandsmålermodul (LRF), producenter, leverandører, fabrik, Kina, fremstillet i Kina, tilpasset, høj kvalitet
Relateret kategori
905nm Laser Range Finder Modul
1535nm Laser Range Finder Modul
1570nm Laser Range Finder-modul
1.54um Laser Rangefinder -modul
1064nm lasermåldesignator
Anti Drone Ststem -modul
Ranging Lidar modul
Send forespørgsel
Du er velkommen til at give din forespørgsel i nedenstående formular. Vi svarer dig inden for 24 timer.