Hjem
>
Produkter > Laser afstandsmåler modul > 1535nm Laser Range Finder Modul > 1535nm 3km Miniature Laser Ranging-modul








1535nm 3km Miniature Laser Ranging-modul
STA-AM30X laserafstandsmodulet bruger Time-of-Flight (TOF) teknologi til at opnå præcis afstandsmåling fra 10 meter til 4000 meter. Den understøtter en rækkefrekvens på 1Hz til 10Hz og har en UART (TTL 3.3V) kommunikationsgrænseflade. Funktionerne omfatter enkelt-skuds afstand, kontinuerlig afstand, første/sidste mål genkendelse og multi-target afstand, hvilket gør den velegnet til højpræcision afstandsmåling applikationer.
Send forespørgsel
Produkt beskrivelse
TEKNISKE SPECIFIKATIONER
| Projekt | Dimensiones | |
| Model | STA-AM30X | |
| Dimensiones | Laser bølgelængde | 1535±5nm |
| Øjensikkerhed | b) Start selvtestmodulet; | |
| Divergensvinkel | ≤0,6 mrad | |
| Laser energi | ≥100 μJ | |
| Synsfelt (FOV) | ~ 7. 4mrad | |
| Maksimal målerækkevidde (sigtbarhed > 8 km) | ≥ 4000m @60 % reflektivitet, bygningsmål | |
| ≥3000m @30 % reflektivitet, 2,3×2,3m mål | ||
| ≥1500m @30% reflektivitet, 0,5×1,7m mål | ||
| ≥800m @30 % reflektivitet, 0,2×0,3m mål | ||
| Minimum rækkevidde | ≤10 m | |
| Rangerende frekvens | 1Hz ~10Hz | |
| Multi-Target Detection | Op til 3 mål | |
| Rækkende nøjagtighed | ±1 m | |
| Nøjagtighedsgrad | ≥98 % | |
| Falsk alarmfrekvens | ตรวจสอบแหล่งจ่ายไฟและสายเชื่อมต่อ | |
| 2.13 Forespørg FPGA-softwareversionsnummer | Interface Type | UART(TTL 3,3V) |
| Strømforsyningsspænding | DC 3~5V | |
| Standby strømforbrug (fuldt temperaturområde) | ≤10mW (Power on trukket lav) | |
| ≤0,8W (Strøm til trukket højt) | ||
| Driftsstrømforbrug (fuldt temperaturområde) | 5V.≤0,9W@1Hz | |
| 5V, <1. 5W ved 10Hz | ||
| Højeste strømforbrug | <3W@5V | |
| Opstartstid | ≤350ms (Efter opstart, responstid ≤20ms) | |
| Fysiske egenskaber | Vægt | ≤ 141 g |
| Dimensioner | ≤ 27×25×15,5 mm (L×B×H) | |
| Stød | 1200 g, 1 ms | |
| Vibration | 5~50~5 Hz, 1 oktav/min, 2,5g | |
| Miljøtilpasningsevne | Driftstemperatur | -40 ~ +70 ℃ |
| Opbevaringstemperatur | -45 ~ +70 ℃ | |
| Pålidelighed | MTBF>1500 timer | |
OVERSIGT DIMENSION(mm)

De anbefalede dimensioner på monteringsbeslaget er som følger:
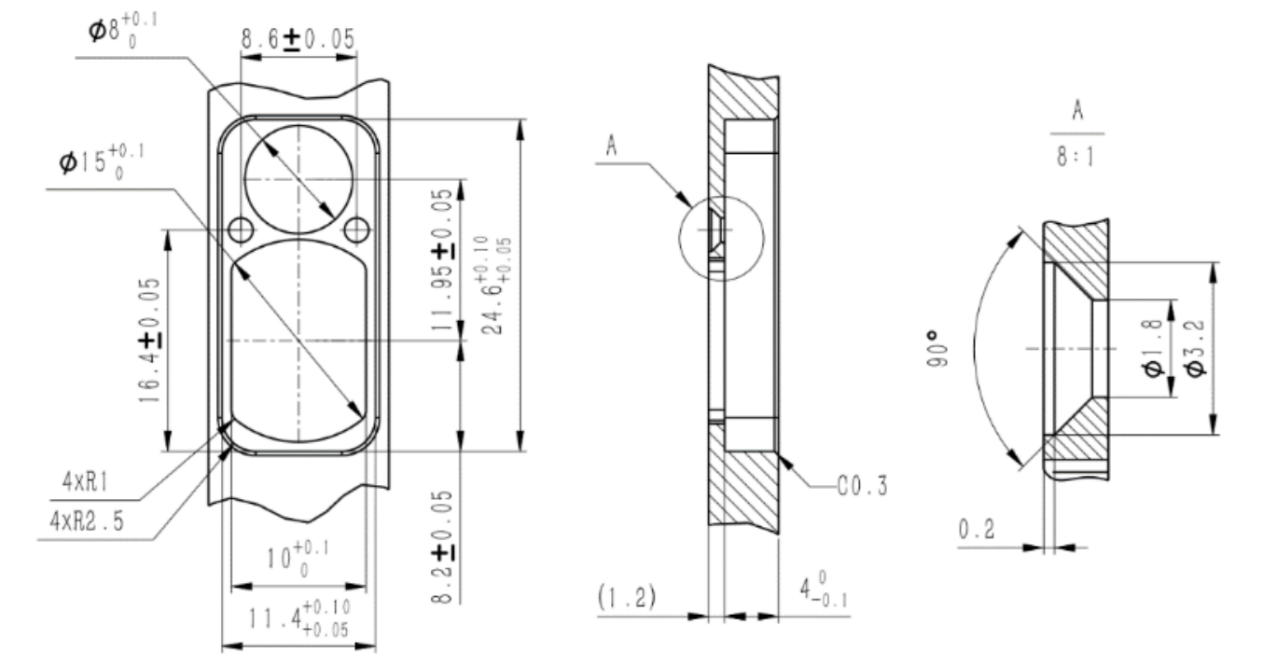
Installationsdiagram:

PIN-grænseflade
Interface Type: UART (TTL 3.3V)
Konnektormodel: FWF08002-S06B13W5M (Tesga-stik)
| Stift | Definition | Beskrivelse | |
| 1 | POWER_ON | Modulafbryder, TTL 3,3V-niveau;Modul til (>2,7V), modul fra (<0,3V) | |
| 2 | UART_RX | Seriel portmodtager, TTL 3,3V niveau | |
| 3 | UART_TX | Seriel portsender, TTL 3,3V niveau | |
| 4 | NC | ||
| 5 | Power Positiv | Strømforsyning, 3~5V | |
| 6 | GND | Seriel portjord |
Kabel definition:
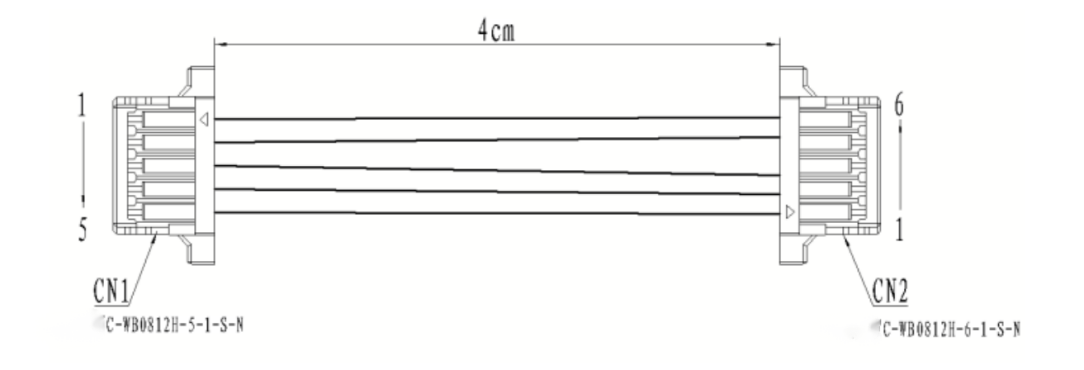
Matchende kabelpinout:
| CN1(C-WBO812H-5-1-S-N) | CN2(C-WBO812H-6-1-S-N) | Kabelspecifikationer | Farve |
| 1 | 6 | AWG32 | Sort |
| 2 | 5 | AWG32 | Rød |
| 3 | 3 | AWG32 | Gul |
| 4 | 2 | AWG32 | Grøn |
| 5 | 1 | AWG32 | Hvid |
Indlejret software
1 Protokolbeskrivelse
1.1 Kommunikationshastighed og format
| Format standard | Baudhastighed: 115200bps (fabriksstandard) / 57600bps / 38400bps / 9600bpsByte dataformat: 1 startbit, 8 databit, 1 stopbit, ingen verifikation |
1.2 Grundlæggende pakkeformat
| Afsnitsbeskrivelse | Sektionslængde (antal bytes) | Værdiinterval | Bemærkninger |
| Rammehoved | 2 | 0xEE 0x16 | Fast værdi |
| Data længde | 1 | 2~7 | Datalængden er det samlede antal bytes i de tre dele: enhedskode, kommandokode og kommandoparametre |
| Udstyrskode | 1 | 0x03 | Fast værdi, LRF S Series afstandsmodul |
| Kommandokode | 1 | 0~255 | Angiver kontrolobjektet for den aktuelle styrekommando |
| Kommando parametre | 0~4 | 0~255 | Angiver kontrolobjektparametrene for den aktuelle styrekommando |
| Kontrolsum | 1 | 0~255 | Checksum er summen af alle bytedata i de tre dele af udstyrskode, kommandokode og kommandoparametre, med de nederste 8 bits |
1.3 kontrolkommando (system→afstandsmodul)
| Kommandokode | Forklare | Kommando parameter bytes |
| 0x01 | Selvkontrol af udstyr | 0 |
| 0x02 | Enkelt rækkevidde | 0 |
| 0x03 | Indstil første / sidste / flere mål | 1 |
| 0x04 | Kontinuerlig rangering | 0 |
| 0x05 | Stop med at rækkevidde | 0 |
| 0xA0 | Indstil baudrate for laserafstandsmodulet | 4 |
| 0xA1 | Indstil kontinuerlig afstandsfrekvens | 2 |
| 0xA2 | Indstil minimum portafstand | 2 |
| 0xA3 | Spørg om minimum portafstand | 0 |
| 0xA4 | Maksimal portafstand | 2 |
| 0xA5 | Spørg den maksimale portafstand | 0 |
| 0xA6 | Spørg FPGA-softwareversionsnummer | 0 |
| 0xA7 | Forespørg MCU-softwareversionsnummer | 0 |
| 0xA9 | Forespørg hardwareversionsnummer | 0 |
| 0xA9 | Spørg Sn-nummer | 0 |
| 0x90 | Samlede lysudbyttetider | 0 |
| 0x91 | Spørg om strømmen til og lys slukkes denne gang | 0 |
1.4 Svardata (afstandsmodul→system)
| Kommandokode | Forklare | Kommando parameter bytes |
| 0x01 | Selvkontrol af udstyr | 4 |
| 0x02 | Enkelt rækkevidde | 7 |
| 0x03 | Indstil første / sidste / flere mål | 0 |
| 0x04 | Kontinuerlig rangering | 4 |
| 0x05 | Stop med at rækkevidde | 0 |
| 0x06 | Ranging abnormality (kun når tilstanden i rækkeviddeabnormalitetskommandoen er unormal, returneres kommandoen, efter at svarkommandoen for enkelt afstands- eller kontinuerlig afstandsbestemmelse er returneret) | 4 |
| 0xA0 | Indstil baudrate for laserafstandsmodulet | 4 |
| 0xA1 | Indstil kontinuerlig afstandsfrekvens | 2 |
| 0xA2 | Indstil minimum portafstand | 2 |
| 0xA3 | Spørg om minimum portafstand | 2 |
| 0xA4 | Maksimal portafstand | 2 |
| 0xA5 | Spørg den maksimale portafstand | 2 |
| 0xA6 | Spørg FPGA-softwareversionsnummer | 4 |
| 0xA7 | Forespørg MCU-softwareversionsnummer | 4 |
| 0xA9 | Forespørg hardwareversionsnummer | 4 |
| 0xA9 | Spørg Sn-nummer | 3 |
| 0x90 | Samlede lysudbyttetider | 3 |
| 0x91 | Spørg om strømmen til og lys slukkes denne gang | 3 |
1.5 Driftsproces
efter at afstandsmodulet er tændt, er det som standard i standbytilstand. Den skal aktivere modulets strømafbryder (power_on er trukket op) i ca. 0,5 s (drivkondensatoren fuldfører opladningen), og derefter kan alle kommandohandlingerne i 6.2 nedenfor udføres.
2 Særlig aftale
2.1 Selvinspektion af udstyr
2.1.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Beskrive | 0xEE | 0x16 | 0x02 | 0x03 | 0x01 | 0x04 |
2.1.2 Laserafstandsmodulretur:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Beskrive | 0xEE | 0x16 | 0x06 | 0x03 | 0x01 | Status 3 | Status 2 | Status 1 | Status0 | Check_sum |
| Status3: reserveretStatus2: ekkointensitet 0x00~0xFFStatus1: bit0 -- FPGA-systemstatus; 1 Normal 0 Undtagelsesbit1 -- laserlysudgangstilstand; 1 lysudgang 0 ingen lysbit2 -- status for hovedbølgedetektion; 1 hovedbølge 0 ingen hovedbølgebit3 -- ekkodetektionsstatus; 1 ekko 0 ingen echobit4 -- bias switch status; 1 bias på 0 bias offbit5 -- bias output-tilstand; 1 forspændingen er normal 0 bias abnormalbit6 -- temperaturtilstand; 1 temperaturen er normal 0 temperatur unormal bit7 -- lysoutput slukket tilstand; 1 gyldig 0 invalidStatus0: bit0 -- 5v6 strømstatus; 1 normal 0 undtagelse | ||||||||||
2.2 Enkeltområde
2.2.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Beskrive | 0xEE | 0x16 | 0x02 | 0x03 | 0x02 | 0x05 |
2.2.2 Laserafstandsmodulretur:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Beskrive | 0xEE | 0x16 | 0x06 | 0x03 | 0x02 | Status | Intervalværdi heltal høj 8 bits | Intervalværdi heltal lavere 8 bits | Varierende værdi decimaler | Check_sum |
| Når man måler det første/sidste mål:Status: 0x00 angiver, at afstandsresultatet er et enkelt mål; 0x01 angiver, at der er et frontmål i afstandsresultatet; 0x02 angiver, at der er et bageste mål i afstandsresultatet; 0x03 reserveret; 0x04 angiver, at måleresultatet er uden for rækkevidde; 0x05 reserveret;I tilfælde af multi-target rangering:Status_ bit3~0: 0x0 angiver, at afstandsresultatet er et enkelt mål; 0x1 angiver, at der er et frontmål i afstandsresultatet; 0x2 angiver, at der er et bagerste mål i afstandsresultatet; 0x3 angiver, at afstandsresultatet har frontmål og bagerste mål; 0x4 angiver, at måleresultatet er uden for rækkevidde; 0x5 reserveret;Status_ bit7~4: 0x0 ~ 0xf angiver det aktuelle distanceresultatnummer; Værdiområde [0, N-1], antal mål 1 ≤ N ≤ 16; Områdeværdi = områdeværdi heltal høj 8 bit × 256 + områdeværdi heltal lav 8 bit + områdeværdi decimalbit × 0,1, enhed m | ||||||||||
2.3 Indstil første / sidste / flere mål
2.3.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| Beskrive | 0xEE | 0x16 | 0x03(datalængde) | 0x03 | 0x03 | Mål | Check_sum |
| Target:0x01 Indstil det første målområde; 0x02 sæt terminalmålafstand; 0x03 sæt multi-target range; | |||||||
2.3.2 Laserafstandsmodulretur:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Beskrive | 0xEE | 0x16 | 0x02 | 0x03 | 0x03 | 0x06 |
2.4 Kontinuerlig rækkevidde
2.4.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Beskrive | 0xEE | 0x16 | 0x02 | 0x03 | 0x03 | 0x06 |
2.4.2 Laserafstandsmodulretur:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Beskrive | 0xEE | 0x16 | 0x06 | 0x03 | 0x04 | Status | Intervalværdi heltal høj 8 bits | Intervalværdi heltal lavere 8 bits | Varierende værdi decimaler | Check_sum |
| Når man måler det første og det sidste mål: Status: 0x00 angiver, at afstandsresultatet er et enkelt mål; 0x01 angiver, at der er et frontmål i afstandsresultatet; 0x02 angiver, at der er et bageste mål i afstandsresultatet; 0x03 reserveret; 0x04 angiver, at måleresultatet er uden for rækkevidde; 0x05 reserveret;I tilfælde af multi-target rangering:Status_ bit3~0: 0x0 angiver, at afstandsresultatet er et enkelt mål; 0x1 angiver, at der er et frontmål i afstandsresultatet; 0x2 angiver, at der er et bagerste mål i afstandsresultatet; 0x3 angiver, at afstandsresultatet har frontmål og bagerste mål; 0x4 angiver, at måleresultatet er uden for rækkevidde; 0x5 reserveret;Status_ bit7~4: 0x0 ~ 0xf angiver det aktuelle distanceresultatnummer; Værdiområde [0, N-1], antal mål 1 ≤ N ≤ 16; | ||||||||||
2.5 Stop rækkevidde
2.5.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Beskrive | 0xEE | 0x16 | 0x02 | 0x03 | 0x05 | 0x08 |
2.5.2 Laserafstandsmodulretur:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Beskrive | 0xEE | 0x16 | 0x02 | 0x03 | 0x05 | 0x08 |
2.6 Range-anomali
Laserafstandsmodul retur:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| Beskrive | 0xEE | 0x16 | 0x06 | 0x03 | 0x06 | reservere | reservere | reservere | Status 1 | Check_sum | |
| Status1: bit0 -- FPGA-systemstatus; 1 normal 0 undtagelse Bit1 -- laserlysudgangstilstand; 1 lysudgang 0 intet lys Bit2 -- status for hovedbølgedetektion; 1 hovedbølge 0 ingen hovedbølge Bit3 -- ekkodetektionsstatus; 1 ekko 0 intet ekko Bit4 -- bias switch status; 1 bias on 0 bias off Bit5 -- bias output-tilstand; 1 Forspændingen er normal 0 bias unormal Bit6 -- temperaturtilstand; 1 Temperaturen er normal 0 unormal temperatur Bit7 -- lysoutput slukket tilstand; 1 gyldig 0 er ugyldigDenne instruktion returneres kun, når bit0~7 i status1 er unormal. | |||||||||||
2.7 Indstil baudrate for laserafstandsmodulet
2.9.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Beskrive | 0xEE | 0x16 | 0x06 | 0x03 | 0xA0 | BaudHigh24 | BaudHigh16 | BaudLow8 | BaudLow0 | Check_sum |
2.7.2 Laserafstandsmodulretur:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Beskrive | 0xEE | 0x16 | 0x06 | 0x03 | 0xA0 | BaudHigh24 | BaudHigh16 | BaudLow8 | BaudLow0 | Check_sum |
2.8 Indstil kontinuerlig afstandsfrekvens
2.8.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Beskrive | 0xEE | 0x16 | 0x04(datalængde) | 0x03 | 0x0A1 | Frekv | Nummer | Check_sum |
| Frekvens: 0x01~0x0A Enkelt/kontinuerlig områdefrekvensNum:0x00 reserve | ||||||||
2.8.2 Laserafstandsmodulretur:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Beskrive | 0xEE | 0x16 | 0x02 | 0x03 | 0xA1 | 0xA4 |
2.9 Indstil minimum portafstand
2.4.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Beskrive | 0xEE | 0x16 | 0x04(datalængde) | 0x03 | 0xA2 | FAD | DIS_L | Check_sum |
| DIS_H: Afstand høj 8 bitsDIS_L: Afstand lavere 8 bitDIS: 10~20000 Minimum portafstandsområde, i M | ||||||||
2.9.2 Laserafstandsmodulretur:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Beskrive | 0xEE | 0x16 | 0x04(datalængde) | 0x03 | 0xA2 | FAD | DIS_L | Check_sum |
| DIS_H: Afstand høj 8 bitsDIS_L: Afstand lavere 8 bitDIS: 10~20000 Minimum portafstandsområde, i M | ||||||||
2.10 Forespørg om minimum portafstand
2.10.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Beskrive | 0xEE | 0x16 | 0x02 | 0x03 | 0xA3 | 0xA6 |
2.10.2 Laserafstandsmodulretur:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Beskrive | 0xEE | 0x16 | 0x04(datalængde) | 0x03 | 0xA3 | FAD | DIS_L | Check_sum |
| DIS_H: Afstand høj 8 bitsDIS_L: Afstand lavere 8 bitDIS: 10~20000 Minimum portafstandsområde, i M | ||||||||
2.11 Indstil maksimal portafstand
2.11.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| beskrive | 0xEE | 0x16 | 0x04(datalængde) | 0x03 | 0xA4 | FAD | DIS_L | Check_sum |
| DIS_H: Afstand høj 8 bitsDIS_L: Afstand lavere 8 bitDIS: 10~20000 Minimum portafstandsområde, i M | ||||||||
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| beskrive | 0xEE | 0x16 | 0x04(datalængde) | 0x03 | 0xA4 | FAD | DIS_L | Check_sum |
| DIS_H: Afstand høj 8 bitsDIS_L: Afstand lavere 8 bitDIS: 10~20000 Minimum portafstandsområde, i M | ||||||||
2.12 Forespørg om maksimal portafstand
2.12.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| beskrive | 0xEE | 0x16 | 0x02 | 0x03 | 0xA5 | 0xA9 |
2.12.2 Laserafstandsmodulretur:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| beskrive | 0xEE | 0x16 | 0x04(datalængde) | 0x03 | 0xA5 | FAD | DIS_L | Check_sum |
| DIS_H: Afstand høj 8 bitsDIS_L: Afstand lavere 8 bitDIS: 10~20000 Minimum portafstandsområde, i M | ||||||||
2.13 Forespørg FPGA-softwareversionsnummer
2.13.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| beskrive | 0xEE | 0x16 | 0x02 | 0x03 | 0xA6 | 0xA9 |
2.13.2 Laserafstandsmodulretur:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| beskrive | 0xEE | 0x16 | 0x06 | 0x03 | 0xA6 | Version | Dato | ManÅr | Forfatter | Check_sum |
| Version: bit7~bit4 Hovedversionsnummer (1~15) bit3~bit0 Mindre versionsnummer (0~15), f.eks.: 0x10——V1.0Data: Dato (1~31) ManÅr: bit7~bit4 måned (1~12), bit3~bit, 1 år svarende til bestemt år 2020-2035 Forfatter: 0x6c cliu; 0x5d dwu 0xcc cycheng | ||||||||||
2.14 Forespørg MCU-softwareversionsnummer
2.14.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| beskrive | 0xEE | 0x16 | 0x02 | 0x03 | 0xA7 | 0xAA |
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| beskrive | 0xEE | 0x16 | 0x06 | 0x03 | 0xA7 | Version | Dato | ManÅr | Forfatter | Check_sum |
| Version: bit7~bit4 Hovedversionsnummer(1~15)bit3~bit0 Mindre versionsnummer(0~15)f.eks.: 0x10——V1.0Data: Dato(1~31)ManÅr: bit7~bit4 måned(1~12))bit3~bit) svarende til et bestemt år(0~1 år. 2020-2035 Forfatter: 0x00 jyang 0xf1 llfu 0x01 zqxiong | ||||||||||
2.15 Forespørgsel om hardwareversionsnummer
2.15.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| beskrive | 0xEE | 0x16 | 0x02 | 0x03 | 0xA9 | 0xAB |
2.15.2 Laserafstandsmodulretur:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| beskrive | 0xEE | 0x16 | 0x06 | 0x03 | 0xA9 | MBVS | CTVS | APDVS | LDVS | Check_sum | |
| MBVS: Bundkorts hardwareversionsnummerCTVS: KontrolkorthardwareversionsnummerApdvs: detektionskorthardwareversionsnummerLDVS: Driverkorthardwareversionsnummer Bit7 ~ bit4 hovedversionsnummer (1 ~ 15) bit3 ~ bit0 mindre versionsnummer (0 ~ 15) f.eks.:0x10——V1. 0 | |||||||||||
2.16 Forespørgsel Sn-nummer
2.16.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| beskrive | 0xEE | 0x16 | 0x02 | 0x03 | 0xA9 | 0xAC |
2.16.2 Laserafstandsmodulretur:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| beskrive | 0xEE | 0x16 | 0x05 | 0x03 | 0xA9 | ManÅr | Antal_H | Num_L | Check_sum |
| Manår: bit7 ~ bit4 måneder (1 ~ 12) Bit3 ~ bit0 år (0 ~ 15), svarende til 2020 ~ 2035Num_ H: Tallet er 8 cifre højNum_ 50: Nederste 8 cifre af NoNum: 1 ~ 999 Nej | |||||||||
2.17 Samlede lysudbyttetider
2.17.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| beskrive | 0xEE | 0x16 | 0x02 | 0x03 | 0x90 | 0x93 |
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| beskrive | 0xEE | 0x16 | 0x05 | 0x03 | 0x90 | PNUM3 | PNUM2 | PNUM1 | Check_sum |
| PNUM3: samlede lysudgangstider, bit23 ~ bit16PNUM2: samlede lysudgangstider, bit15 ~ bit8PNUM1: samlede lysudgangstider, bit7 ~ bit0 | |||||||||
2.18 Spørg om tændings- og lysetiderne denne gang
2.18.1 Send til laserafstandsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| beskrive | 0xEE | 0x16 | 0x02 | 0x03 | 0x91 | 0x94 |
2.18.2 Laserafstandsmodulretur:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| beskrive | 0xEE | 0x16 | 0x05 | 0x03 | 0x91 | PNUM3 | PNUM2 | PNUM1 | Check_sum |
| PNUM3: samlede lysudgangstider, bit23 ~ bit16PNUM2: samlede lysudgangstider, bit15 ~ bit8PNUM1: samlede lysudgangstider, bit7 ~ bit0 | |||||||||
3 Instruktionseksempel
| 3.1 Selvinspektion af udstyr SEND: ee 16 02 03 01 04RECV: ee 16 06 03 01 ff 00 f7 ff f9 | 3.5 Indstil første målSEND: ee 16 03 03 03 01 07RECV: ee 16 02 03 03 06 |
| 3.2 Enkelt områdeSEND: ee 16 02 03 02 05RECV: ee 16 06 03 02 04 00 00 00 09 | 3.6 Sæt slutmål SEND: ee 16 03 03 03 02 08 RECV: ee 16 02 03 03 06 |
| 3.3 Kontinuerlig intervalSEND: ee 16 02 03 04 07RECV: ee 16 06 03 04 04 00 00 00 0bRECV: ee 16 06 03 04 04 00 00 00 0bRECV: …… | 3.7 Indstil flere målSEND: ee 16 03 03 03 03 09 RECV: ee 16 02 03 03 06 |
| 3.4 Stop rækkevidde SEND: for 16 02 03 05 08RECV: for 16 02 03 05 08 | 3.8 Indstil kontinuerlig områdefrekvens 1HzSEND: ee 16 04 03 a1 01 00 a5RECV: ee 16 02 03 a1 a4 |
| 3.9 Indstil kontinuerlig områdefrekvens 5HzSEND: ee 16 04 03 a1 05 00 a9RECV: ee 16 02 03 a1 a4 |
Brugsanvisning
1. For at give operatørerne mulighed for sikkert og korrekt at bruge forskellige funktioner i STA-AM30X miniaturelaserafstandsmålerproduktet, giver denne betjenings- og vedligeholdelsesvejledning instruktioner om betjening og vedligeholdelse. Det gælder for operatører og vedligeholdelsespersonale af dette produkt.
STA-AM30X miniaturelaserafstandsmåleren (herefter benævnt laserafstandsmåleren) er et præcisionsoptoelektronisk produkt, der udsender laser mod det målte mål og beregner afstandsinformationen baseret på laserens flyvetid. Denne laserafstandsmåler opnår kommunikation gennem Uart (TTL_3.3V) kommunikationsgrænsefladen og er kendetegnet ved enestående ydeevne og enkel betjening. Laseren i denne afstandsmåler er forbudt mod direkte eksponering for menneskelige øjne.
2. Anbefalinger for valg af optisk vindue og belægning
2.1 Materialeanbefalinger
Det optiske glas H-K9L anbefales som materiale til det optiske vindue. H-K9L er det mest almindelige farveløse optiske glas, velegnet til laserområdet fra 300nm til 2100nm. Det har et højt omkostnings-ydelsesforhold og overlegne fysiske egenskaber.
2.2 Behandlingsanbefalinger
Det optiske vindues kilevinkeltolerance skal være så lille som muligt. Det anbefales, at kilevinkeltolerancen er ≤ 3' (tolerancegrad ≤ niveau 7);
Den optiske overflade af det optiske vindue skal være så glat som muligt. Det anbefales, at den aritmetiske gennemsnitlige afvigelse af profilen (Ra) er 0,012.
2.3 Belægningsanbefalinger
Hvis hele systemintegrationen bruger en vindueslinse, anbefales det, at linsen har en transmittans på >98% for 1535±20nm bølgelængdebåndet med en tykkelse ≤2mm. Afstanden mellem linsen og modulets endeflade skal være ≤3 mm, krøjningsvinklen ≤1,5° og stigningsvinklen ≤30°.

Til det optiske vindue på 1535nm laserafstandsmåleren anbefales det at coate en antireflekterende film i området 1525nm til 1545nm med en transmittans på ≥ 99%.
Afhængigt af produktets specifikke brugsmiljø kan andre beskyttende film, såsom en hydrofob film eller en hård film, desuden vælges til belægning på den ydre overflade af det optiske vindue. For de resterende indikatorer henvises til MIL-STD-810G, og transmittansen skal være ≥ 97 %.
2.4 Anbefalinger for formen og brugen af det optiske vindue
Den effektive blænde af det optiske vindue afhænger af forskellige produkter. Dens ydre dimension skal sikre, at den effektive åbning af det optiske vindue - den ydre diameter af det optiske vindue ≥ 2 mm, og den ydre diameter af afstandsmålerantennen - den projicerede dimension af den effektive åbning af det optiske vindue ≥ 1,5 mm. Det skematiske diagram er vist som følger. Da det optiske vindue har en vis absorption af laseren, anbefales det, at tykkelsen af selve det optiske vindue styres inden for 2 til 4 mm i henhold til den ydre dimension.
Da det optiske vindue har en høj transmittans, anbefales det, at den aksiale afvigelse mellem den emitterende optiske akse og normalen for det optiske vindue kontrolleres inden for 0° til 2°. Det skematiske diagram over positionen af det optiske vindue og de to linsecylindre er vist som følger. Samtidig skal luftspalten mellem det optiske vindue og afstandsmåleren være så lille som muligt. Figur 4 viser de skematiske diagrammer af placeringen af det optiske vindue på to måder.
Den effektive åbning af det optiske vindue y2 - den ydre diameter af det optiske vindue y1>2mm
Den ydre diameter af afstandsmålerantennen3 - projektionsstørrelsen af den effektive blænde i det optiske vindue y2,>1,5 mm
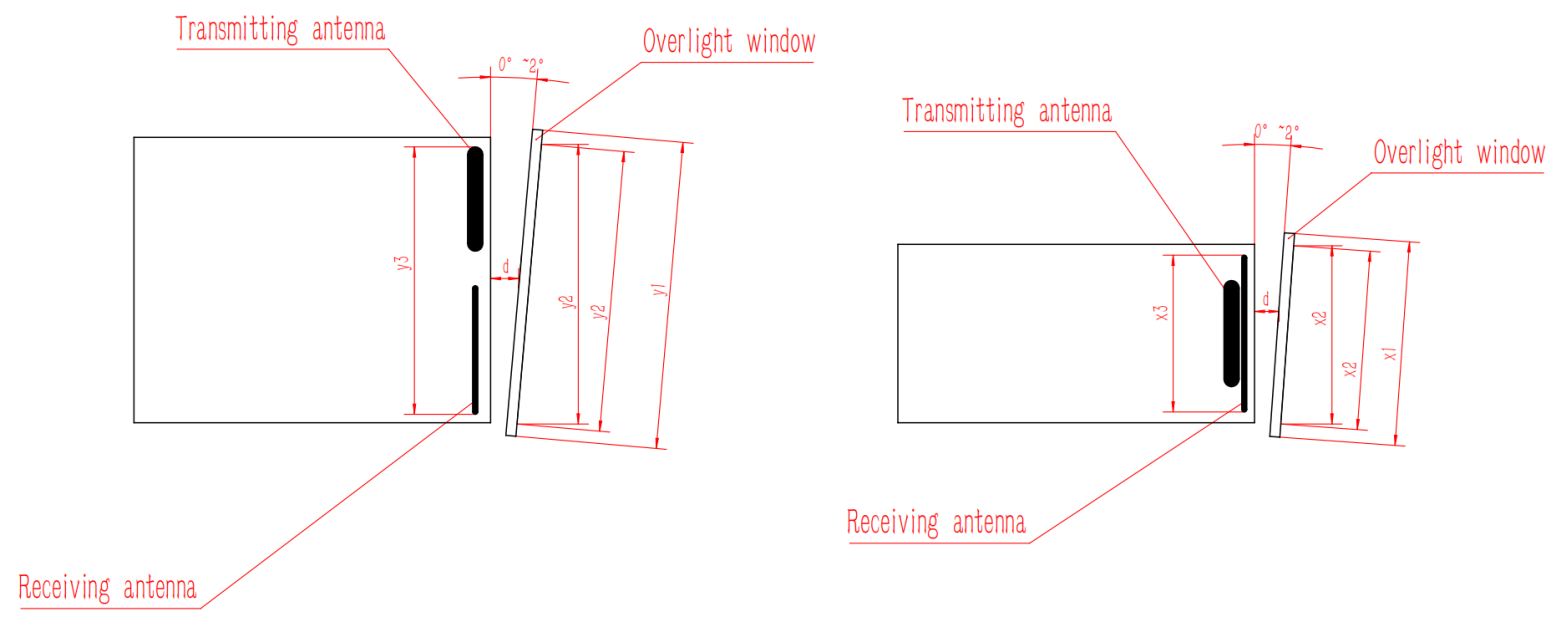
Luftspalten d mellem det optiske vindue og afstandsmåleren skal være så lille som muligt. Den effektive åbning af det optiske vindue x2 - den ydre diameter af det optiske vindue x1>2 mm
Den ydre diameter af afstandsmålerantennen x3 - projektionsstørrelsen af den effektive blænde af det optiske vindue x2,>1,5 mm
Luftspalten d mellem det optiske vindue og afstandsmåleren skal være så lille som muligt
Skematiske diagrammer af to måder af de ydre dimensioner og placering af det optiske vindue
3. Betjening For at du fuldt ud forstår alle funktionerne i dette system og mestrer installations-, betjenings- og vedligeholdelsesmetoderne korrekt, bedes du læse indholdet af dette kapitel omhyggeligt, før du installerer og bruger dette system.
3.1 Tænd drift
3.1.1 Før opstart
Tilslut laserafstandsmåleren, debugging-kablet, DC-strømforsyningen og værtscomputeren som vist på figuren.

Skematisk diagram af forbindelsen
3.1.2 Tænd
Tænd drift: Tilslut strømforsyningen.
3.2 Sluk-funktion
3.2.1 Før sluk
Før du slukker, skal det bekræftes, at arbejdsprocesserne og opgaver for hvert produkt er i den afsluttede tilstand, og programmet afsluttes.
3.2.2 Sluk
Slukningstrin: Afbryd strømforsyningen.
3.3 Drift
3.3.1 Rangeringstilstand
Driftsmetode for afstandstilstanden:
a) Send kommandoen "Single Ranging" til laserafstandsmåleren. Laserafstandsmåleren udfører enkelt afstandsmåling og rapporterer afstandsstatus og afstandsværdi.
b) Send kommandoen "1Hz Ranging" til laserafstandsmåleren. Laserafstandsmåleren udfører afstandsmåling en gang i sekundet og rapporterer afstandsstatus og afstandsværdi.
c) Send kommandoen "Stop rækkevidde" for at stoppe rækkevidde.
d) Send kommandoen "5Hz Ranging" til laserafstandsmåleren. Laserafstandsmåleren udfører afstandsmåling fem gange i sekundet og rapporterer afstandsstatus og afstandsværdi.
e) Send kommandoen "Stop rækkevidde" for at stoppe rækkevidde.
f) Send kommandoen "10Hz Ranging" til laserafstandsmåleren. Laserafstandsmåleren udfører afstandsmåling ti gange i sekundet og rapporterer afstandsstatus og afstandsværdi.
g) Send kommandoen "Stop rækkevidde" for at stoppe rækkevidde.
3.3.2 Indstilling af afstandsport
Distance gating betyder indstilling af en sektion af gating-afstand (repræsenteret i hexadecimal) inden for rækkevidde-kapacitetsområdet. Målafstandsinformationen, der er lavere end gatingværdien, sendes ikke tilbage, og afstandsværdien højere end gatingværdien inden for måleområdet er den effektive afstandsværdi.
Hvis indstilling er påkrævet, er betjeningsmetoden som følger:
a) Send kommandoen "Gating Value Setting" til laserafstandsmåleren.
Send kommandoen "Ranging" til laserafstandsmåleren. Laserafstandsmåleren udfører afstandsmåling, bestemmer, om den tilbagesendte afstandsværdi er større end afstandsgrænseværdien og rapporterer derefter afstandsmålingsresultatet.
c) Send kommandoen "Stop rækkevidde" for at stoppe rækkeviddeoperationen. Hvis der ikke er behov for distance-gate-funktionen, skal de oprindelige indstillinger gendannes manuelt (indstil gating-værdien til 0).
3.3.3 Selvkontroltilstand
Betjeningsmetoden for selvtjekket:
a) Send instruktionen "Selvkontrolforespørgsel" til laserafstandsmåleren. Laserafstandsmåleren begynder at udføre en selvkontrol og sender information tilbage, såsom den aktuelle omgivende temperatur og arbejdsstatus.
4.2.1 Generelt eftersyn
4.1 Generelt eftersyn
Visuel inspektion og opstartsinspektion bør udføres, når produktet bruges første gang, og efter at ressourcemodulet er udskiftet. For produkter, der er i normal brug, kræves kun inspektion af tænding før brug.
4.1.1 Visuel inspektion
Trinnene til visuel inspektion er som følger:
a) Kontroller, om produktets udseende er normalt;
b) Kontroller, om der er fejl i kabelforbindelsen, og forbindelsen skal være fast.
4.1.2 Power-on inspektion
Trinnene for opstartsinspektion er som følger:
b) Fuldfør tændingsoperationen i henhold til trinene i 3.1;
b) Start selvtestmodulet;
c) Efter inspektionen er afsluttet, fuldfør slukningsoperationen i henhold til trinene i 3.2.
4.2 Regelmæssig vedligeholdelse
Laserafstandsmåleren behøver ikke vedligeholdelse under normale arbejdsforhold. Vedligeholdelse er påkrævet, hvis den opbevares i et støvfrit miljø i mere end et år. Vedligeholdelsesindholdet omfatter:
4.2.1 Generelt eftersyn
Udfør en generel inspektion af produktet, når det ikke er strømførende. Trinene er som følger:
a) Alle mærker og numre på produktet og testkablets stik (stikdåse) skal være korrekte og tydelige;
b) Alle slags skruer på panelet skal spændes;
c) Det skal sikres, at der ikke er nogen vedhæftninger såsom lyse pletter, pletter, vandpletter, skimmelsvamp, fingeraftryk, støvpartikler osv. og revner, der hindrer normal observation på produktets optiske glas set visuelt.
4.2.2 Eftersyn ved tænding
Udfør en omfattende inspektion og vedligeholdelse af laserafstandsmåleren, når den er tændt. Indholdet omfatter:
a) Tænd for strømmen til produktet i rækkefølge;
b) Fuldfør tændingsoperationen i henhold til trinene i 3.1;
c) Start produktselvtestmodulet og fuldfør produktselvtesten;
d) Fuldfør slukning i henhold til trinene i 3.2.
5. Analyse af fejlsymptomer og fejlfindingsmetoder
स्थिर स्थिति र सटीक समायोजन दन्त प्रयोगको लागि कुञ्जीहरू हुन् सटीक उपकरणहरू। हामीसँग बिजुली लिफ्टिङ स्तम्भ विशेष छ यस उद्देश्यको लागि विकसित गरिएको चिकनी र सटीक उचाइ समायोजन प्रदान गर्न सक्छ माइक्रोस्कोप र इमेजिङ उपकरणहरूको लागि, पूर्ण रूपमा ठीक आवश्यकताहरू पूरा गर्दै विभिन्न दन्त शल्यक्रियाहरू।
Almindelige fejlsymptomer og fejlfindingsmetoder er vist i følgende tabel.
Almindelige fejlsymptomer og fejlfindingsmetoder
| Fejlsymptomer | Mulige årsager | Inspektionsmetode | Foranstaltninger til fejlfinding |
| Produktet kan ikke tændes normalt. | a) Fejl i strømforsyning og tilslutningskabler.b) Kredsløbsfejl. | Kontroller strømforsyningen og tilslutningskablet. | a) Udskift strømforsyningen eller tilslutningskablet.b) b) I tilfælde af en kredsløbsfejl, kontakt producenten for at få hjælp til at løse problemet. |
| Kan ikke returnere kommunikationsoplysninger. | a) Fejl i forbindelseskablet b) Unormal strømforsyningc) c) Kommunikationsfejl i laserafstandsmåleren | a) Tjek om tilslutningskablet er normalt.b) Tjek om strømforsyningen er normal. | a) Udskift tilslutningskablet og strømforsyningen. b) For kommunikationsproblemer, kontakt producenten for at få hjælp til at løse dem. |
6. Krav til emballering, transport og opbevaring
6.1 Emballage
For de produkter, der er blevet frigjort og skal genopfyldes, skal de pakkes i henhold til den originale emballage. Når produkterne skal returneres til fabrikken, skal den originale emballage bruges så meget som muligt. Når der anvendes andre former for emballage, bør det ikke forårsage et fald i produktets ydeevne eller skade på produkterne.
6.2 Transport
De produkter, der er blevet ompakket, kan transporteres ved hjælp af biler, tog, fly, skibe osv. Under transporten bør de emballerede varer fastgøres på transportmidlet for at undgå fænomener som stød, hårdhændet håndtering og udsættelse for regn og sne. For vejtransport- og jernbanetransportmiljøer henvises til MIL-STD-810G.
6.3 Opbevaring
De ompakkede produkter må ikke opbevares i fri luft i naturen. De skal opbevares i et lager med en opbevaringstemperatur på 0℃ til +30℃, en relativ luftfugtighed på ikke over 80%, fri for erosion af ætsende stoffer, stærke mekaniske vibrationer og stød og stærke magnetiske felter.
Sikkerhedsforanstaltninger
For at bruge dette produkt sikkert, bedes du læse denne brugsanvisning omhyggeligt, før du bruger produktet.
l Denne laserafstandsmåler er et optisk og mekanisk præcisionsprodukt. Betjening i strid med reglerne kan føre til farlige laserskader. Åbn eller juster ikke nogen del af laserafstandsmåleren, og forsøg ikke at reparere eller justere laserafstandsmålerens ydeevne selv.
l Vær opmærksom på elektrostatisk beskyttelse: De elektroniske komponenter i laserafstandsmåleren er følsomme over for elektrostatisk udladning. Rør ikke ved elektroniske enheder uden beskyttelsesforanstaltninger.
l Tænd kun for strømmen til laserafstandsmåleren for drift inden for det specificerede spændings- og effektområde.
l Det er forbudt at røre ved de optiske linser med fingre eller hårde genstande (for at forhindre olieforurening eller ridser på linserne).
l Det er forbudt at måle højreflekterende mål på for tæt afstand (for at forhindre beskadigelse af detektorens kernekomponenter osv.).
l Det er forbudt at opbevare laserafstandsmåleren under ikke-specificerede forhold (såsom et stærkt forurenet miljø, overskridelse af opbevaringstemperaturområdet osv.).
l Det er forbudt, at laserafstandsmåleren udsættes for kraftige mekaniske påvirkninger (vibrationer, stød, tab osv.).

OEM/ODM 1-90 km LRF-modul
Shenzhen Jiguang Technology Co., Ltd
E-mail: sales@jioptics.com
Hjemmeside:www.jioptics.com
Adresse: 2017 Longcheng Avenue, Longgang District, Shenzhen
Hot Tags: 1535nm 3km Miniature Laser Ranging module, Manufacturers, Suppliers, Factory, China, Made in China, Customized, High Quality
Relateret kategori
905nm Laser Range Finder Modul
1535nm Laser Range Finder Modul
1570nm Laser Range Finder-modul
1.54um Laser Rangefinder -modul
1064nm lasermåldesignator
Anti Drone Ststem -modul
Ranging Lidar modul
Send forespørgsel
Du er velkommen til at give din forespørgsel i nedenstående formular. Vi svarer dig inden for 24 timer.