Hjem
>
Produkter > Laser afstandsmåler modul > 905nm Laser Range Finder Modul > 1200m Mini Laser Rangefinder Module(LRF)




")

1200m Mini Laser Rangefinder Module(LRF)
STA-M-serie Miniature Laser RangeFinder-modul vedtager 905nm halvlederlaserkomponenter, med lavt strømforbrug, lille størrelse, stabil ydelse og andre egenskaber, der er egnet til termisk billeddannelse, nattsyn og andre håndholdte mobile enheder og miniaturiseret UAV-podudstyrsintegration.
Målingsområde: 5-1200 meter
Måling af træer ≥1000 meter
Målnøjagtighed ± 1M
Vægt ≤14 ± 0,5 g
Send forespørgsel
Produkt beskrivelse
Tekniske parametre vises i følgende tabel
| Model | STA-M010X | |
| Laserbølgelængde | 905nm | |
| Ranging af kapacitet | Bygning | 1200m |
| Træer | 1000 m | |
| Laserklasse | Klasse 1 Øjensikkerhed | |
| Mini rækkevidde | 5m | |
| Opløsning | ± 0,1 m | |
| Driftsstrøm | ≤90mA | |
| Standby nuværende | ≤20ma | |
| Strømforbrug | Standby≤0.09W | |
| Peak≤0.23w | ||
| Kommunikationsgrænseflade | TTL | |
| Driftstemperatur | · -20 ℃ ~+55 ℃ | |
| Opbevaringstemperatur | · -30 ℃ ~+60 ℃ | |
| Indgangsspænding | 3-5V (anbefalet 5V strømforsyning) | |
| Beam Divergensvinkel | 5 sygdomme | |
| I området frekvens | 1-3Hz | |
| Magt | ≤1 MW sikkert for menneskelige øjne | |
| Rangingmetode | Puls | |
| Vægt | 14 ± 0,5 g | |
| Størrelse | Φ23x47mm | |
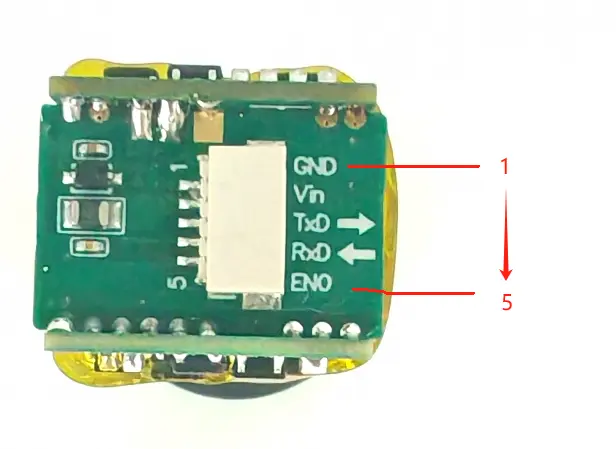
Grænseflader og stifter er defineret som vist i følgende tabel
| TTL -interface | |||
| Stift | PIN -definition | Beskrive | Skematisk tegning |
| 1 | GND | Strømforsyning - |
|
| 2 | Vin | Strømforsyning + | |
| 3 | Txd | Send data | |
| 4 | Rxd | Modtagne data | |
| 5 | Eno | Aktivér pin, reserveret | |
|
|
|
|
|
Modul kommunikationskommandokort
| Master Command | ||
| Kommandokode | Beskrivelse | Broadcast ADD. svar |
| 0x80 | Læs RangeFinder -status | INGEN |
| 0x81 | Læs målesultatet | INGEN |
| 0x83 | Start i området | INGEN |
| 0x84 | Stop i området | INGEN |
| 0x9e | Kommunikationsparameterprogram | JA |
| 0xBe | Læs kommunikationsparameter | JA |
| 0xc0 | Kommunikationstest | JA |
| 0xc1 | Læs firmwareversion | JA |
|
|
|
|
| Slavespons | ||
| Genkendelseskode | Beskrivelse | |
| 0x60 | Enkel svarramme | |
| 0x01 | Range dataramme | |
| 0x20 | Rangefinder -statusramme | |
| 0x21 | Kommunikationsparameterramme | |
| 0xe0 | Fejlmeddelelsesramme | |
NOTE
1. Kommunikationsrammeformatet:
SlaveID + instruktion + parameter + kontrolsum
2. Intervallet mellem to tilstødende rammer skal være mindst tidspunktet for 1,5 byte, når
Sendt ud, når det er mindre end 1ms, betragtes det som 1ms;
600bps: 25ms
1200bps: 12,5ms
2400bps: 6,25ms
4800bps: 3.125ms
9600bps: 1,56ms
19200bps: 1ms (0,78ms <1ms, tage 1ms)
3. afsendelse af beregning af kontrolsum;
Dette modul bruger bekræftelsestilstand for byte med byteakkumuleringssummen, slaveid er ikke
Inkluderet i verifikationen, til sidst afsendelse af kontrolsum.
Såsom beregning af kontrolsummen af scanningstilstandsinstruktion "0x83 0x40":
A. beregning af akkumuleringssum: 0x83 + 0x40 = 0xc3;
B.Take LSB [D7..D0]: 0xc3;
C. Kalkulere 2's komplement: 0x100 - 0xc3 = 0x3d, 0x3d er kontrolsum;
Tilføj slaveadresse, når Mater sender: 0x10 0x83 0x40 0x3d
4. verifikationskvittering;
Såsom modtagskommunikationsramme: 0x10 0x83 0x40 0x3d, verifikation ikke inklusive
Slaveadresse 0x10
A. beregner akkumuleringssum: 0x83 + 0x40 + 0x3d = 0x100;
B.Take LSB af akkumuleringssum: 0x00; 0x00 er verifikationsresultat;
Hvis verifikationsresultatet er 0x00, betyder det, at modtagne data er rigtigt; Hvis verifikationsresultatet
er ikke 0x00, det betyder, at modtagne data er forkert.
Modulkommando Beskrivelse
Bemærk: I eksemplet er slaveadressen for hver kommando 0x10; i anvendelse vil slaveadressen være den programmerede.
1 、 Kommunikationstest (0xc0) ;
| Master sender | ||
| Kommandokode | Parameter | Beskrivelse |
| 0xc0 | Ingen |
|
| Slavesvar | ||
| Genkendelseskode | Parameter | Beskrivelse |
| 0x60 | Ingen |
|
| Eksempel | ||
| Master Sends: 0x10 0xc0 0x40; 0x40 er kontrolsum Slavesvar: 0x10 0x60 0xa0; 0xa0 er checksume |
||
2 、 Kommando slave til at begynde med (0x83) ;
| Master sender | ||
| Kommandokode | Parameter | Beskrivelse |
| 0x83 | Byte1 | D7: Reserve |
| D6: Kontinuerlig rækkevidde, 0 = slukket; 1 = ON; | ||
| D5: tåge -tilstand, 0 = off; 1 = ON; | ||
| D4: Dataenhed, 0 = meter; 1 = gård; | ||
| D3 - D0: Arbejdstilstand, 0 = Ranging; 1 = hastighed; 2 = lille måltilstand; | ||
| Slavesvar | ||
| Genkendelseskode | Parameter | Beskrivelse |
| 0x60 | Ingen | Hvis slaven er indstillet som automatisk eksporttilstand, svarer Slave 0x60 først efter modtagelse af startområdet, efter at det er afsluttet, vil den derefter sende et resultat; |
| Eksempel | ||
| Master sender: 0x10 0x83 0x00 0x7d: Mode 0 er til en enkelt måling, dataenhed er meter; 0x10 0x83 0x40 0x3d: Mode 0 er til kontinuerlig mesure, dataenheden er meter; 0x10 0x83 0x10 0x6d: Mode 0 er til en enkelt måling, dataenhed er gård; 0x10 0x83 0x20 0x2d: Mode 0 er til kontinuerlig mesure, dataenhed er gård; Slavesvar: 0x10 0x60 0xa0; |
||
Note:1 、 Hvis der er indstillet moduldataeksportmetode som forespørgselstilstand, kan den kun foretage en enkelt måling;
2. I hastighedstilstand er kontinuerlig funktionskonkurrence nul, det er ingen kontinuerlig hastighedsforanstaltning;
3.FOG -tilstand er kun gyldig til enhed med tågefunktionsfunktion;
4.Slave sender 0x60 svarramme Efter modtagelse af startområdet Ranging Command, den vil begynde at sende Ranging Resultat, efter at området er afsluttet.
3 、 Kommando Slave Stop Ranging (0x84) ;
| Master sender | ||
| Kommandokode | Parameter | Beskrivelse |
| 0x84 | Ingen |
|
Bemærk: Efter at Master har sendt kommandoen til slave for at gøre kontinuerligt, skal den sende denne kommando til slave for at stoppe i området. Hvis Master sender kommandoen til slave til at gøre en gang i området, er det ikke nødvendigt at sende denne kommando, forårsage, at slave stopper i området automatisk, efter at spænder er færdig.
4 、 Læsning af slavestatus (0x80) ;
| Master sender | ||
| Kommandokode | Parameter | Beskrivelse |
| 0x80 | Ingen |
|
| Slavesvar | ||
| Genkendelseskode | Parameter | Beskrivelse |
| 0x20 | Byte1 | D7: 1 = RangeFinder optaget; 0 = varierende færdig; D6: 1 = RangeFinder -funktionsfejl; 0 = ingen funktionsfejl; D5-D2: Reserve; D1: 0 = vinkelsensor forbudt; 1 = vinkelenser aktiveret; D0: 0 = vinkelsensor er normal; 1 = unormal vinkelsensor; |
| Byte2 | Reservere | |
5 、 Læs Range Finder Resultat (0x81) ;
| Master sender | |
| Beskrivelse |
|
|
|
|
| Slavesvar | |
| Beskrivelse |
|
| D7 :: Afstandsdata, 0 = Data gyldige; 1 = ugyldige data; D6 :: Vinkeldata, 0 = Data gyldige; 1 = ugyldige data; D5: Dataopløsning, 0 = 0,5/LSB; 1 = 0,1/LSB; D4: Dataenhed, 0 = meter; 1 = gård; D3 - D0: Arbejdstilstand, 0 = Ranging; 1 = hastighed; |
|
| Når afstanden er gyldig: afstand [D15..D8]; Når afstanden er ugyldig: 0x80 = varierende intet resultat; 0x81 = systemfejl; |
|
| Når vinkel er gyldig: afstand [D7..D0]; Når vinkel er ugyldig: Reserve; |
|
|
|
|
| Eksempel | |
| 1 、 Slave sender afstandsramme: 0x10 0x01 0x60 0x12 0xd7 0xb6 Afstandsværdi = 0x12d7 = 4823 = 482,3 m 2 、 Slave sender hastighedsramme: 0x10 0x01 0x21 0x03 0xd7 0x04 Hastighedsværdi = 0x03d7 = 983 = 98,3 km/t 3 、 Slave sender afstandsramme: 0x10 0x01 0xe0 0x80 0x00 0x9f Afstandsværdien er ugyldig (den første byte er 0xe0, d7 = 1) |
|
6 、 Skriv slavekommunikation Baud Rate (0x9e), fabriksindstillingen er 19200bps ;
| Master sender | ||
| Kommandokode | Parameter | Beskrivelse |
| 0x9e | Byte1 | skal være 0x90 |
| Byte2 | Reservere | |
| Byte3 | Reservere | |
| Byte4 | Indstilling af baudhastighed: 0 = 1200bps; 1 = 2400bps; 2 = 4800bps; 3 = 9600bps; 4 = 19200bps (standard); |
|
| Slavesvar | ||
| Genkendelseskode | Parameter | Beskrivelse |
| (Se slaveansvaret af læsning af slaveparameteren) | ||
| Eksempel | ||
| Hvis Master sender ramme: 0x10 0x9e 0x90 0x00 0x00 0x04 0xce; Det betyder: Indstil baudhastighed for slave som 19200bps, | ||
Bemærk: Ny baudhastighed er kun gyldig, efter at modulet er genstartet;
7 、 Skriv slaveadresse (0x9e), fabriksindstillinger: 0x10 ;
| Master sender | ||
| Kommandokode | Parameter | Beskrivelse |
| 0x9e | Byte1 | Skal være 0x91 |
| Byte2 | Reservere | |
| Byte3 | Reservere | |
| Byte4 | slave ny adresse; | |
| Slavesvar | ||
| Genkendelseskode | Parameter | Beskrivelse |
| (Se slaveansvaret af læsning af slaveparameteren) | ||
| Eksempel | ||
| For at skrive slaveadresse som 0x20, sender mester: 0x10 0x9e 0x91 0x00 0x00 0x20 0xb1 | ||
Note:1. ny slaveadresse er gyldig, når enheden er genstartet
2. 0x00 er udsendt, så slaveadresse kan ikke indstilles som 0x00;
3. Standard slaveadresse er 0x10;
8 、 Skriv målt resultateksportmetode (0x9e) ;
| Master sender | ||
| Kommandokode | Parameter | Beskrivelse |
| 0x9e | Byte1 | Skal være 0x92 |
| Byte2 | Reservere | |
| Byte3 | Reservere | |
| Byte4 | Målt resultat Eksport Method Selecttiong: 0 = forespørgselstilstand (slave kan kun eksportere data, når master sender læsekommando) 1 (standard) = automatisk tilstand (efter at det er afsluttet, sender den automatisk data ud); |
|
| Slavesvar | ||
| Genkendelseskode | Parameter | Beskrivelse |
| (Se slaveansvaret af læsning af slaveparameteren) | ||
| Eksempel | ||
| For at ændre dataeksport til automatisk eksport, sender Master: 0x10 0x9e 0x92 0x00 0x00 0x01 0xcf | ||
9 、 Indstil UART IO -spænding (0x9e), fabriksindstilling: 3,3V ;
| Eksempel | ||
| Kommandokode | Parameter | Beskrivelse |
| 0x9e | Byte1 | Skal være 0x93 |
| Byte2 | Reservere | |
| Byte3 | Reservere | |
| Byte4 | UART IO Spændingsindstilling: 72 - 199, 0,025V/LSB; | |
| Slavesvar | ||
| Genkendelseskode | Parameter | Beskrivelse |
| (Se slaveansvaret af læsning af slaveparameteren) | ||
| Eksempel | ||
| Skift UART IO -spænding til 3,3V, derefter Master Sends: 0x10 0x9e 0x93 0x00 0x00 0x84 0x4b | ||
BEMÆRK : VIO = Indstilling * 0,025V, Standard VIO = 3,3V
10 、 Læsning af kommunikationsparameter (0xBE) ;
| Master sender | ||
| Kommandokode | Parameter | Beskrivelse |
| 0xBe | Byte1 | Skal være 0x91 eller 0x92 |
| Slavesvar | ||
| Genkendelseskode | Parameter | Beskrivelse |
| 0x21 | Byte1 | Slaveadresse: 0x01 - 0xff |
| Byte2 | D4: Dataeksportmetode; D3 - D0: Indstilling af baudhastighed; |
|
| Byte3 | UART IO Spændingsindstilling | |
11 、 Slave sender forkerte oplysninger (0xe0) ;
| Slavesvar | ||
| Genkendelseskode | Parameter |
|
| 0xe0 | Byte1 | D7 - D3: Reserve; D2: 1 = Kommunikationsparameterfejl; D1: 1 = uigenkendelig kommando; D0: 1 = kontrolsumfejl; |
12 、 Læs firmwareversion (denne kommando blev kun understøttet i v7,00 eller nyere version;) ;
| Master sender | ||
| Kommandokode | Parameter |
|
| 0xc1 | Ingen |
|
| Slavesvar | ||
| Genkendelseskode | Parameter | Noter |
| 0x61 | Byte0 | Maj version (BCD) |
| Byte1 | Mindre version (BCD) | |
| Eksempel | ||
| Slavesvar: 0x10 0x61 0x07 0x00 0x98 Data "0x07 0x00" betyder, at firmwareversion er v7,00. |
||
Hot Tags: 1200m Mini Laser RangeFinder Module (LRF), producenter, leverandører, fabrik, Kina, lavet i Kina, tilpasset, høj kvalitet af høj kvalitet
Relateret kategori
905nm Laser Range Finder Modul
1535nm Laser Range Finder Modul
1570nm Laser Range Finder-modul
1.54um Laser Rangefinder -modul
1064nm lasermåldesignator
Anti Drone Ststem -modul
Ranging Lidar modul
Send forespørgsel
Du er velkommen til at give din forespørgsel i nedenstående formular. Vi svarer dig inden for 24 timer.





")